AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A positioning method and product technology, applied in image data processing, instrument, character and pattern recognition, etc., can solve problems affecting product positioning accuracy and product image quality.
Active Publication Date: 2019-08-30
GUANGDONG LYRIC ROBOT INTELLIGENT AUTOMATION CO LTD
View PDF5 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0002] At present, the commonly used product positioning methods mainly include template matching algorithm and image edge extraction algorithm. Whether it is a template matching algorithm or an image edge extraction algorithm, the accuracy of product positioning depends on the imaging quality of the product image. When equipment such as camera focusing, background light when taking pictures, etc. or the current of the photocell is not suitable, it will affect the product image quality, thereby affecting the accuracy of product positioning
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
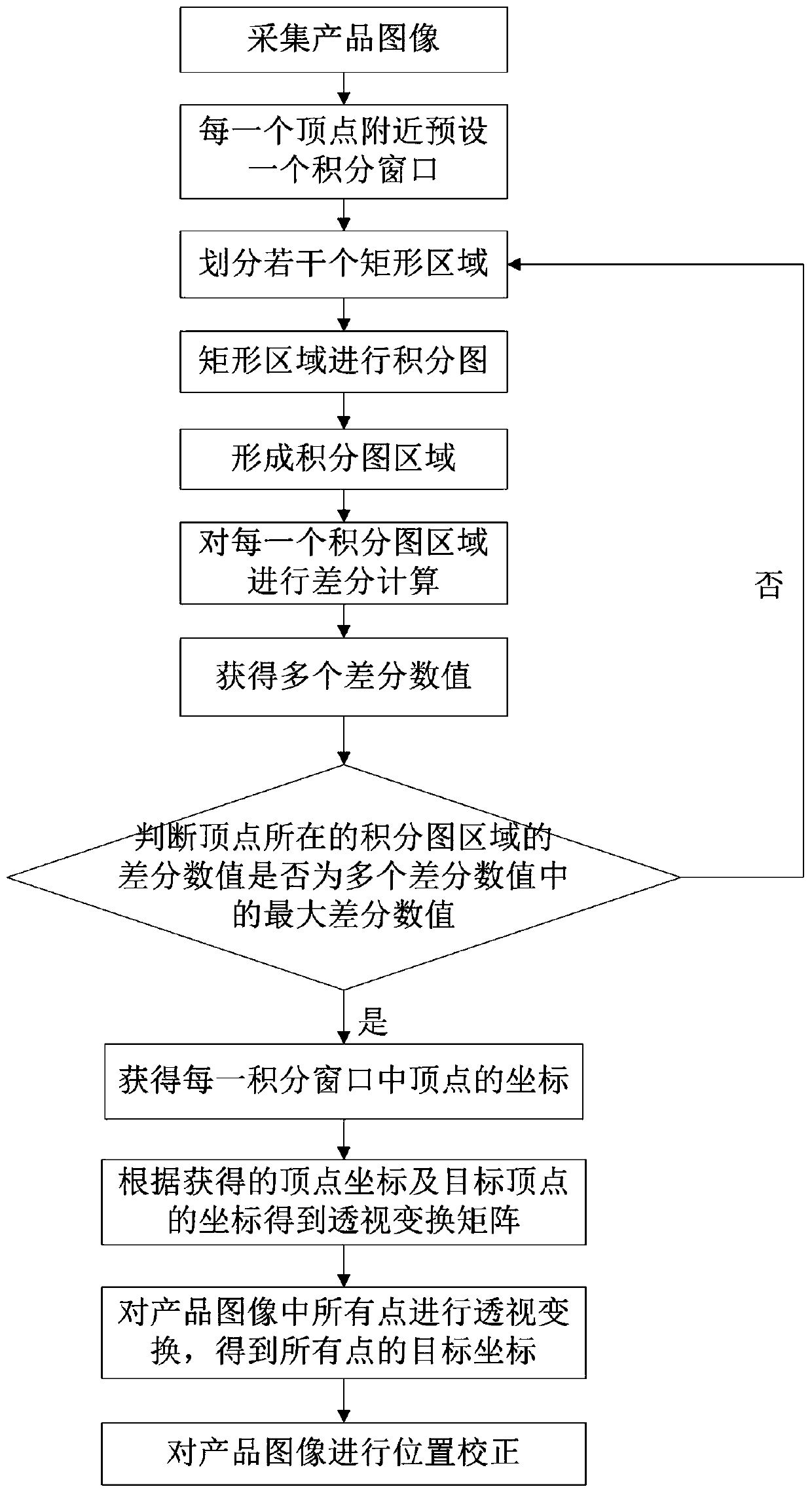
[0055] Please refer to figure 1 As shown, it is a flow chart of cell positioning. As shown in the figure, the cell positioning method includes:
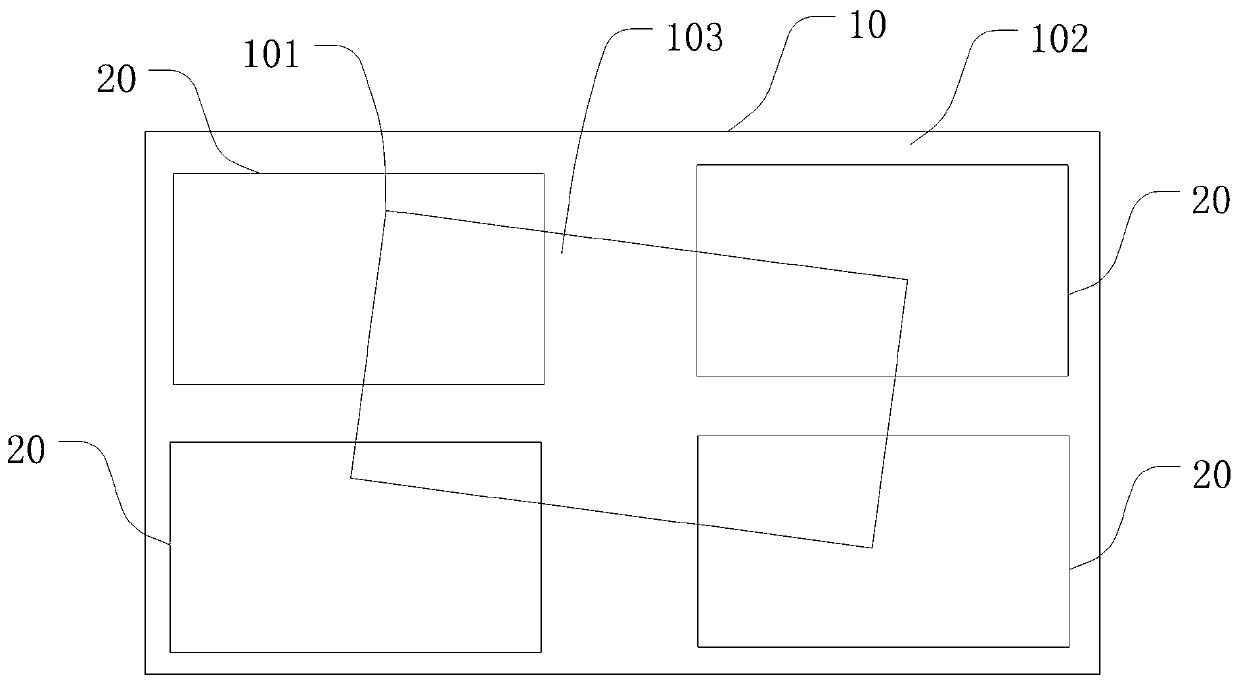
[0056] The cell image 10 is collected, wherein a CCD vision system may be used to photograph the cell to form the cell image 10 , or an image sensor may be used to collect the cell image 10 .
[0057] After the cell image 10 is collected, integral image calculation is performed on the cell image 10 . The integral graph calculation process is as follows:
[0058] Please refer to figure 2 As shown in , it is a schematic diagram of integral graph calculation in the integral window. An integration window 20 is preset near each vertex 101 of the battery image 10, that is, an integration window 20 is preset at the approximate position of each vertex 101 of the battery image 10, without considering the precise position of the vertex 101, so Even if the quality of the cell image 10 is not high, it is only necessary to preliminarily esti...
Embodiment 2
[0093] For the product positioning method of this embodiment, please refer to Figure 7 As shown, it is a flow chart of cell positioning in this embodiment. The difference from Embodiment 1 is that the product positioning method in this example can be realized without preset integration windows. Such as Figure 7 As shown, the cell positioning methods include:
[0094] The battery image 10 is collected, and after the collection of the battery image 10 is completed, the integral map calculation is performed on the battery image 10 . The integral graph calculation process is as follows:
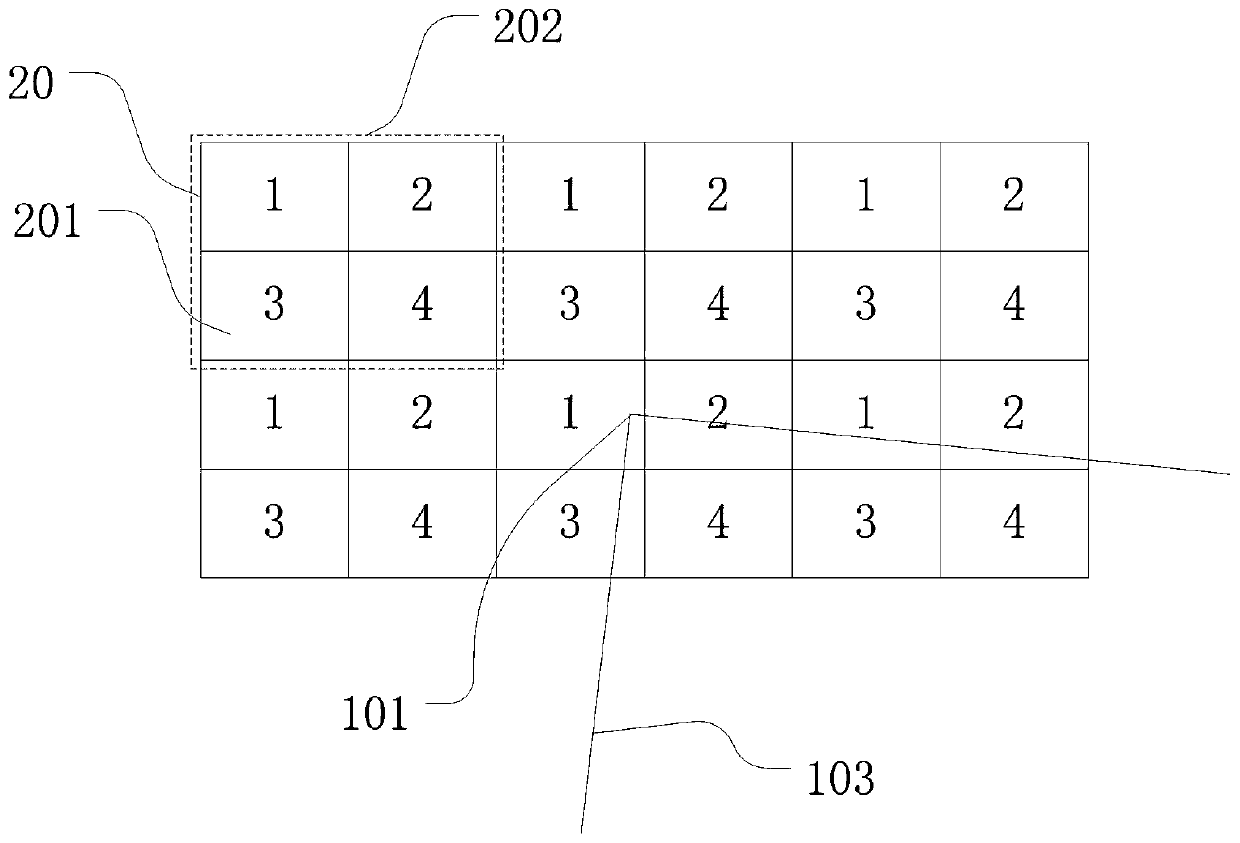
[0095] Please refer to Figure 8 As shown in , it is a schematic diagram of integral graph calculation in this example. Carry out integral map calculation on the cell image 10, when performing the integral map calculation of the cell image 10, specifically proceed as follows: divide the cell image 10 into several first rectangular areas 201, each first rectangular area 201 The integral map...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a product positioning method. The method comprises the steps of collecting a product image; carrying out integral graph calculation on the product image; and obtaining coordinates of each vertex in the product image by adopting a differential calculation mode according to the calculated integral image. According to the invention, the integral graph algorithm is applied to product positioning; therefore, when the product image quality is not high, such as image blurring, the product is inconvenient to position by adopting an image edge algorithm or a template matching algorithm, the product image and the background area can be quickly divided by adopting an integral graph algorithm, so that the product can be positioned without being limited by the image quality.
Description
technical field [0001] The present application relates to the technical field of product positioning, and in particular, relates to a product positioning method. Background technique [0002] At present, the commonly used product positioning methods mainly include template matching algorithm and image edge extraction algorithm. Whether it is a template matching algorithm or an image edge extraction algorithm, the accuracy of product positioning depends on the imaging quality of the product image. When equipment such as camera focusing, background light when taking pictures, etc., or the current of the photocell is not suitable, it will affect the image quality of the product, thereby affecting the accuracy of product positioning. Contents of the invention [0003] Aiming at the deficiencies of the prior art, the present application provides a product positioning method. [0004] A product positioning method disclosed in this application includes: [0005] Capture product...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More