

A simple target recognition method based on yuv color space
A simple and targeted technology, applied in the field of simple target recognition based on YUV color space, it can solve the problems of complex operation, high requirements on target information, calibration method, and difficulty in implementation, and achieves rapid calibration, simplified target calibration algorithm, and satisfactory accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
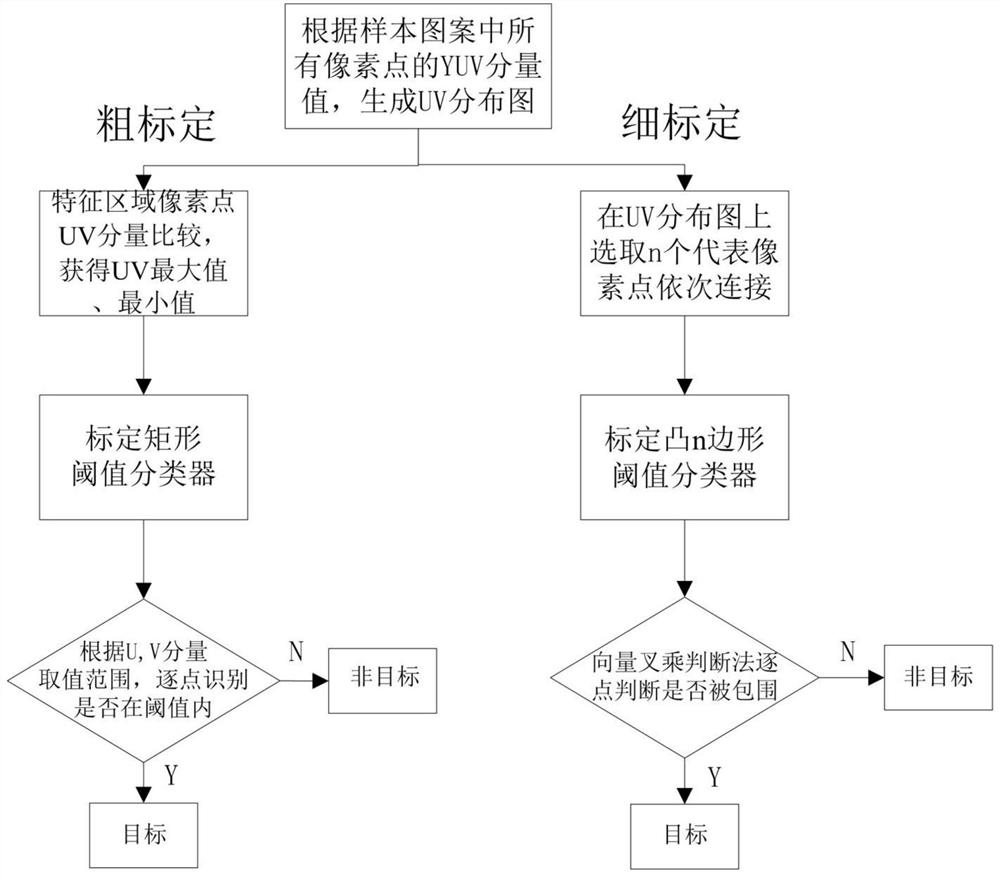
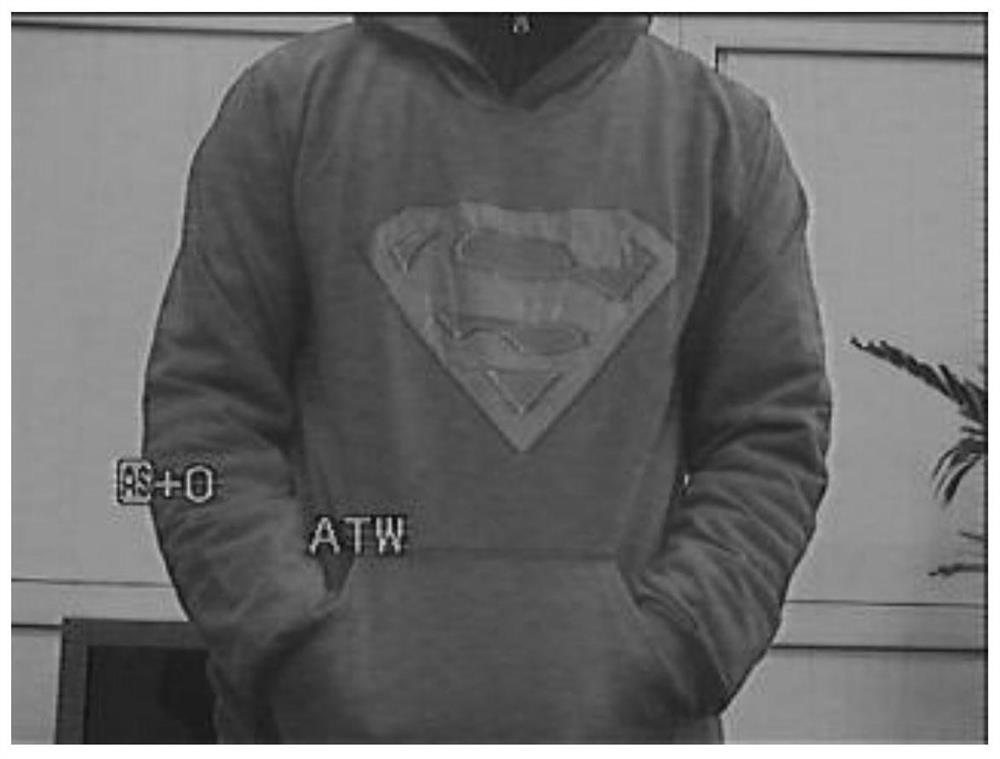
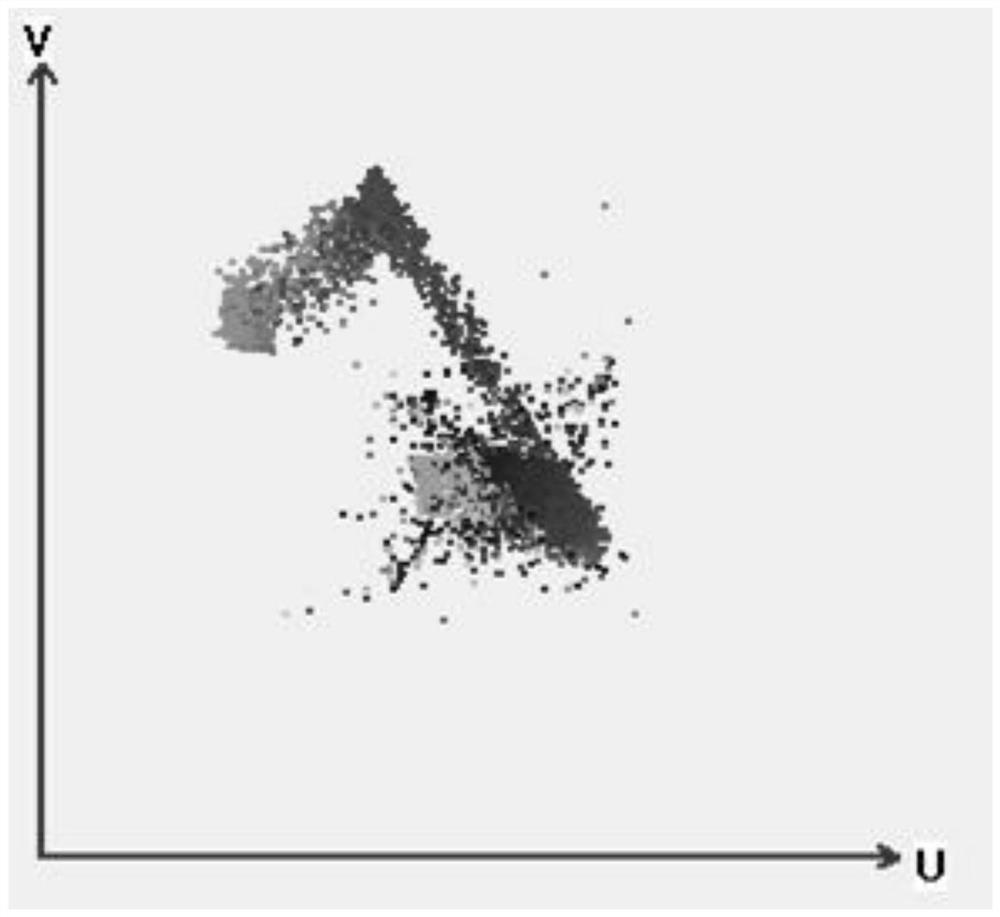
[0030] Such as figure 2 The sample pattern of , the front of the clothes with blue background color is "Superman logo", that is, there is a red S in the red polygonal frame, the fill color in the polygonal frame is yellow, the target pattern is the polygonal frame and the S in the polygonal frame, then The color feature of the target pattern is red. In the VC++ software, read the sample pattern to obtain the Y, U, and V component values of all pixels in the sample pattern, and generate a UV distribution map as shown in image 3 . Then perform coarse calibration and fine calibration respectively, the specific process is as follows:
[0031] Coarse calibration scheme: Find the pixel point area representing the target pattern feature on the generated UV distribution map, click the feature area with the mouse, and compare the U and V component values of the pixel points containing the target feature area point by point to obtain the U and V component values The maximum and ...
Embodiment 2
[0038] Applying the identification method of the present invention to the field of robots can enable the robot to acquire the ability to distinguish colors, thereby laying the foundation for realizing higher intelligence of the robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More