

Bowden cable pre-tensioning mechanism for power-assisted robot with flexible exoskeleton
A pre-tightening mechanism and exoskeleton technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limiting the assisting speed of exoskeleton robots, flying out and getting stuck in the gap between wheels and shells, etc., to improve rapid maneuverability, Securing comfort and improving the structural stability of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solution of the present invention will be further stated below in conjunction with specific embodiments and accompanying drawings.
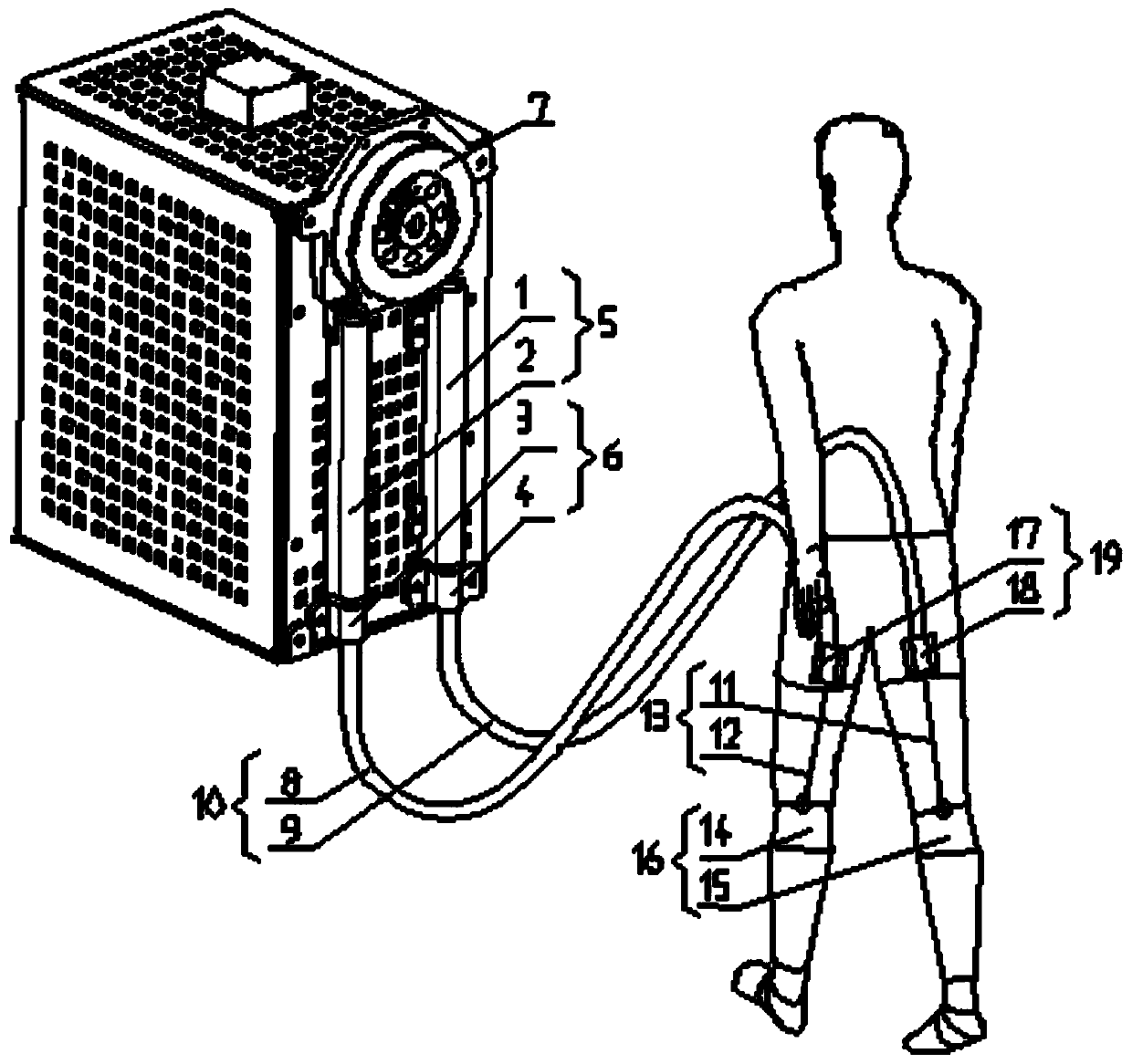
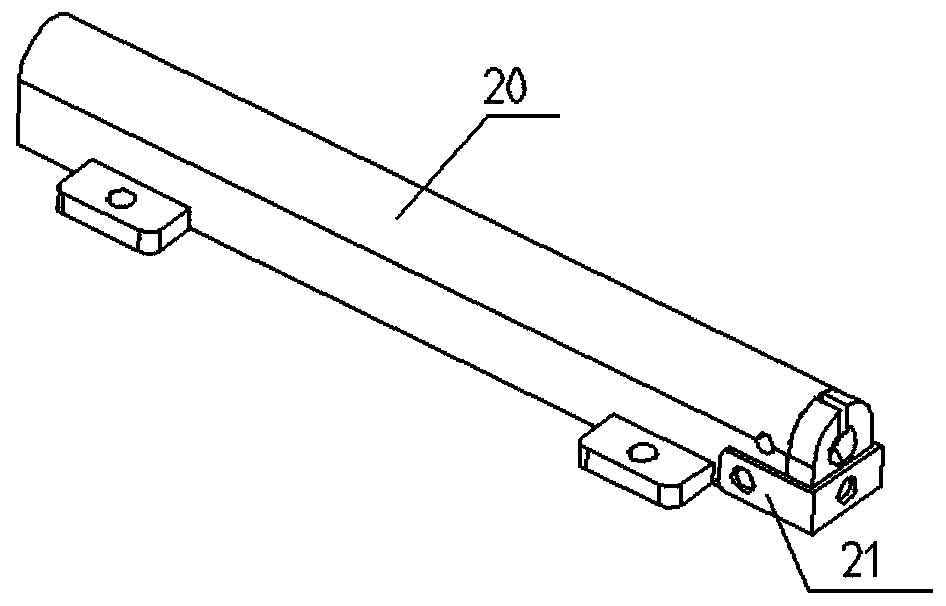
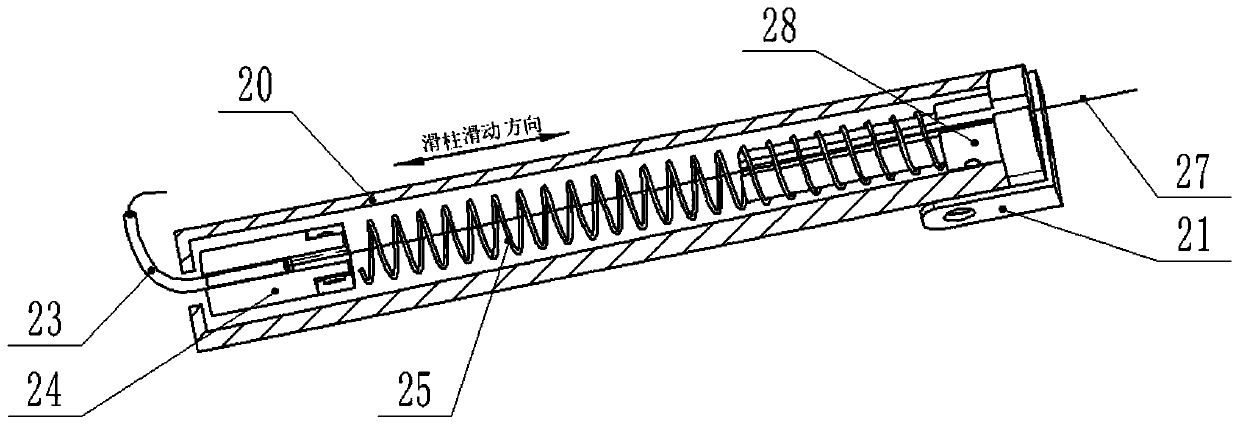
[0023] The present invention provides a flexible exoskeleton power-assisted robot Bowden line pretension mechanism (referred to as pretension mechanism, see Figure 1-5 ), the pretensioning mechanism includes a conduit 20, a sliding column 24, an upper cover 28, a U-shaped sheet 21 and a stage clip 25.
[0024] The conduit 20 is a hollow strip structure with a full opening at one end and a through hole in the middle of the other end. The inside is a smooth round hole. The diameter of the smooth round hole is larger than the through hole in the middle of one end. On the end face of the full opening end, the sliding post 24 is installed inside the end face of the other end, the clip spring 25 is arranged between the sliding post 24 and the upper cover 28 , and the U-shaped piece 21 is sleeved on the outer side of the upper cove...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More