

Robot avoidance driving method and device and robot
A robot and driving direction technology, applied in the field of data processing, can solve the problems of low efficiency, low efficiency, inflexible avoidance and other problems of robot task execution, and achieve the effect of improving execution efficiency, reducing workload and improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
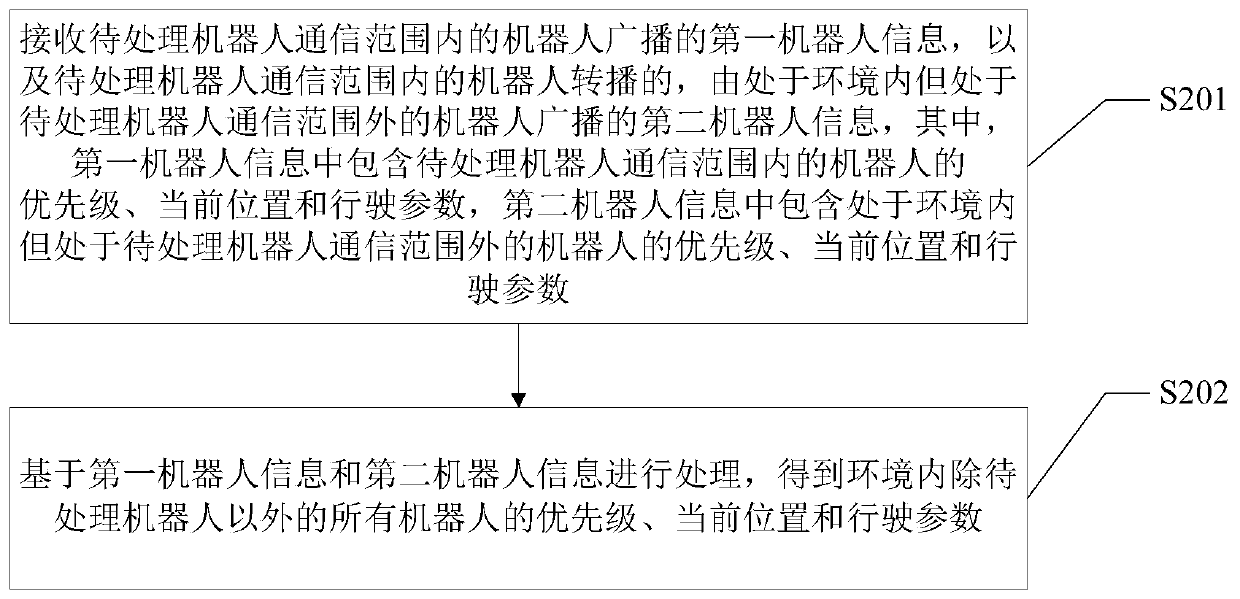
[0055] As a specific implementation of obtaining robot priority, current position and driving parameters in Embodiment 1 of the present invention, such as figure 2 As shown, Embodiment 2 of the present invention includes:
[0056] S201, receiving the first robot information broadcast by the robot within the communication range of the robot to be processed, and the second robot information broadcast by the robot within the communication range of the robot to be processed and broadcast by the robot in the environment but outside the communication range of the robot to be processed , wherein the first robot information includes the priority, current position and driving parameters of the robot within the communication range of the robot to be processed, and the second robot information includes the priority, Current position and driving parameters.
[0057] In order to realize the autonomous conflict avoidance operation of the decentralized robot, in the embodiment of the prese...
Embodiment 3
[0061] As a specific implementation of obtaining robot priority, current position and driving parameters in Embodiment 1 of the present invention, such as image 3 As shown, the third embodiment of the present invention includes:
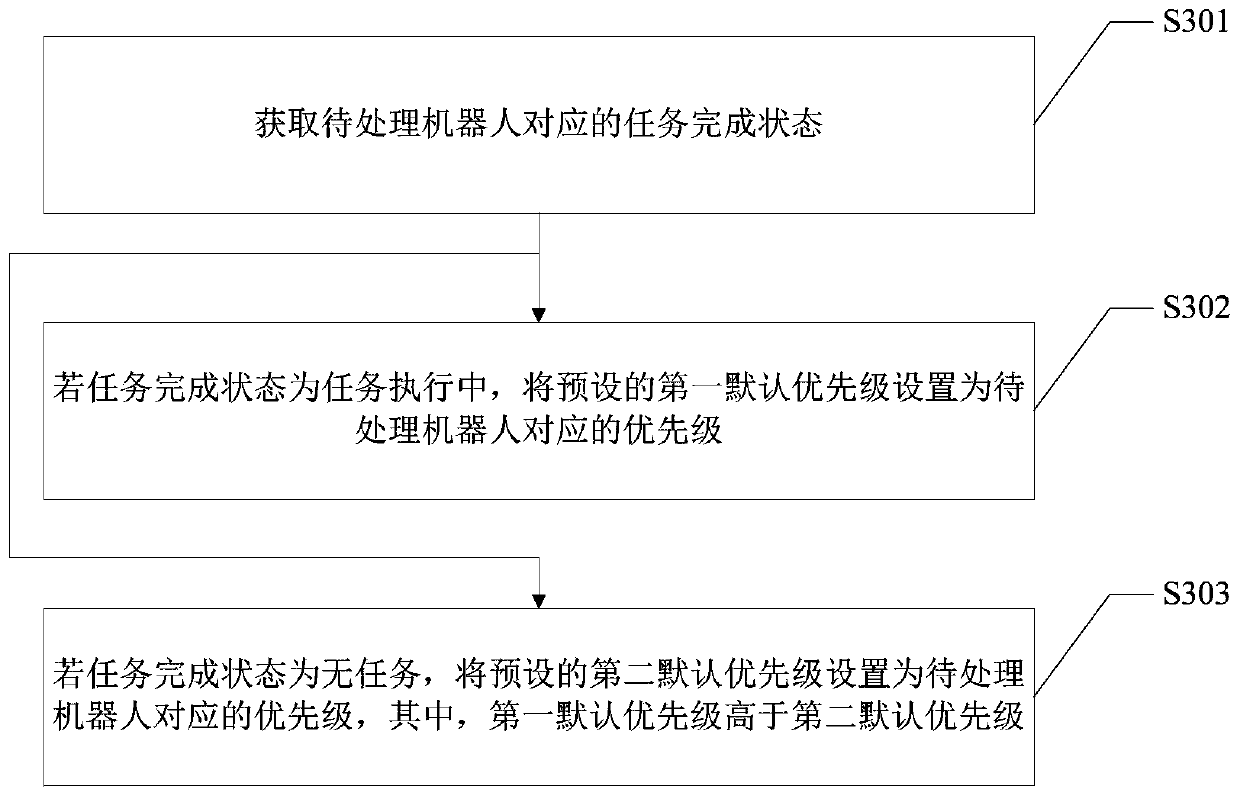
[0062] S301. Obtain the task completion status corresponding to the robot to be processed.
[0063]S302. If the task completion status is task execution, set the preset first default priority as the priority corresponding to the robot to be processed.
[0064] S303. If the task completion status is no task, set the preset second default priority as the priority corresponding to the robot to be processed, wherein the first default priority is higher than the second default priority.
[0065] Considering that in order to reduce the workload of the overall robot in the first embodiment of the present invention, only the low-priority robot performs the conflict avoidance operation, so for a single robot, when it is responsible for performing important ...
Embodiment 4
[0070] As a specific implementation of identifying the area scene type of the environment area in Embodiment 1 of the present invention, as Figure 4 As shown, Embodiment 4 of the present invention includes:
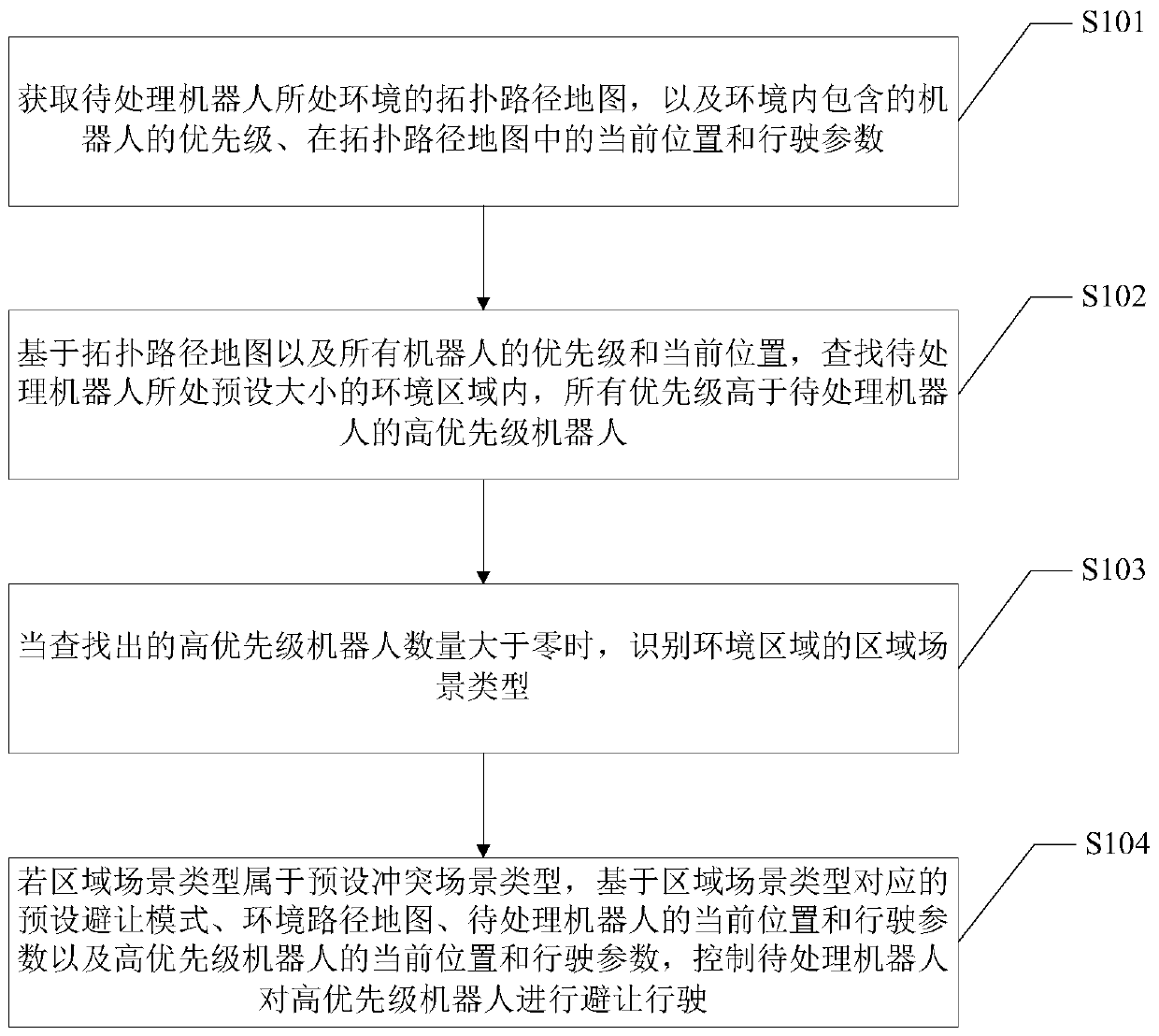
[0071] S401. Identify path types included in the environmental area based on the topological path map.
[0072] In the embodiment of the present invention, the path type includes some possible road conditions, such as a dead end (that is, a road with only one entrance and exit), a cross road (that is, two or more roads intersect), straight roads, and turning roads. In order to ensure that the robot can safely and effectively deal with various conflict situations and effectively avoid obstacles, in the embodiment of the present invention, a variety of conflict road situations that may be encountered will be classified to obtain different path types, and for each path Different avoidance strategies are set according to the actual driving conditions between robots under th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More