

A Parameter Calibration Method for Joint Arm Coordinate Measuring Machine Based on Hybrid Optimization Algorithm
A coordinate measuring machine and optimization algorithm technology, applied in the field of precision measurement, can solve problems such as poor local search ability, accumulated errors, and many parameters, and achieve the effects of improving parameter calibration accuracy, measurement accuracy, and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
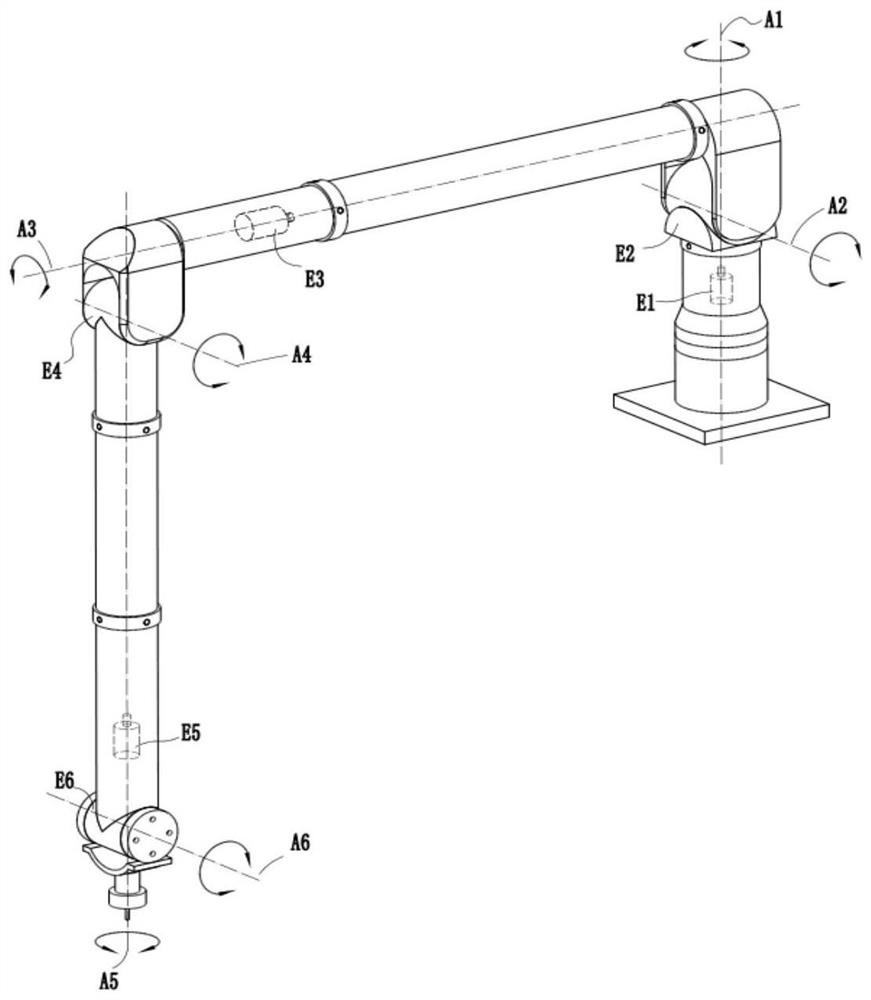
[0055] The present invention is aimed at the parameter calibration problem of an articulated arm coordinate measuring machine. The articulated arm coordinate measuring machine is a six-degree-of-freedom non-orthogonal coordinate measuring machine imitating a human arm. connected in series with a structure such as figure 1 As shown, in the research process of the present invention, the nominal values of the structural parameters of the articulated arm coordinate measuring machine used are shown in Table 1.
[0056] Table 1 Nominal values of the structural parameters of the articulated arm coordinate measuring machine
[0057]
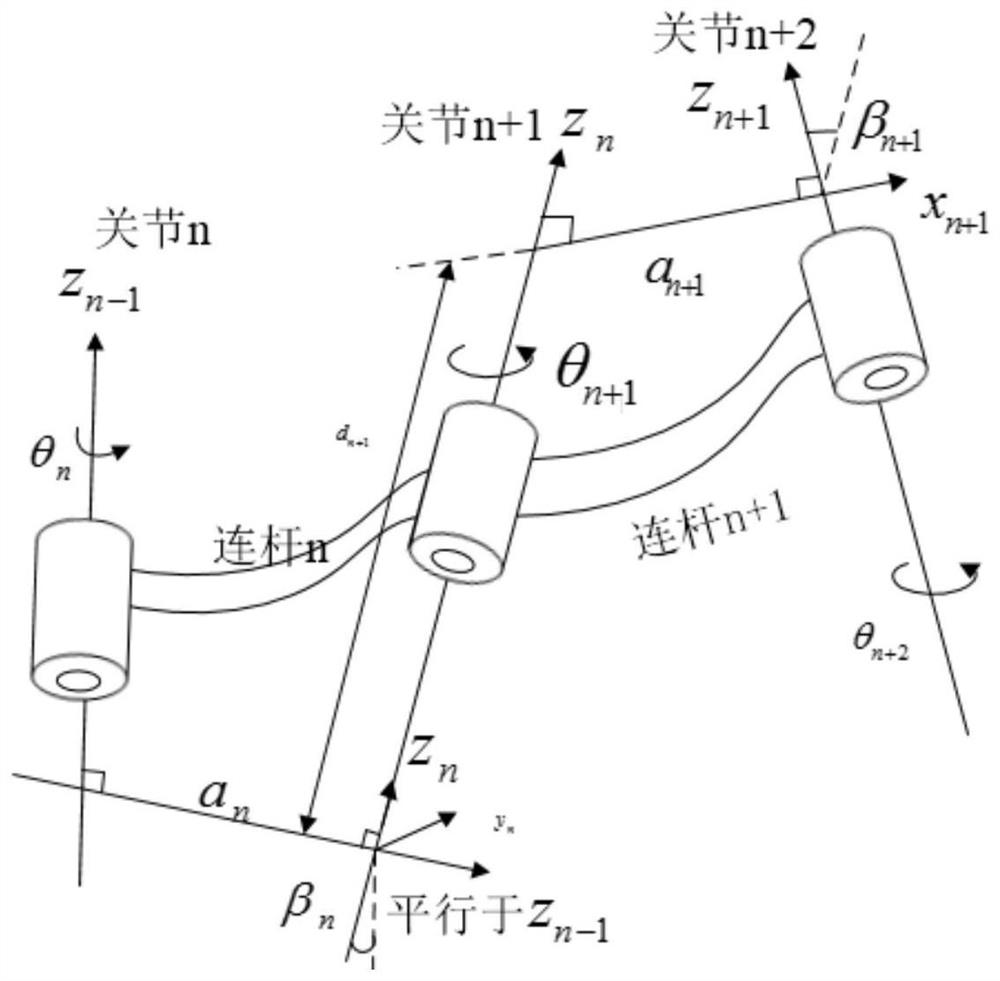
[0058] Table 1, θ i Indicates the joint rotation angle, a i Indicates the member length, d i Indicates the member offset, β i Indicates the torsion angle of the member.
[0059] For the above-mentioned articulated arm coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More