

A calibration method of articulated coordinate measuring machine based on ipde algorithm
A coordinate measuring machine and calibration method technology, applied in the direction of measuring devices, instruments, etc., can solve problems such as difficulty in finding the global optimal solution, inability to meet the identification speed at the same time, and weak global convergence ability, so as to reduce computational complexity and fast convergence The effect of improving the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further described below.
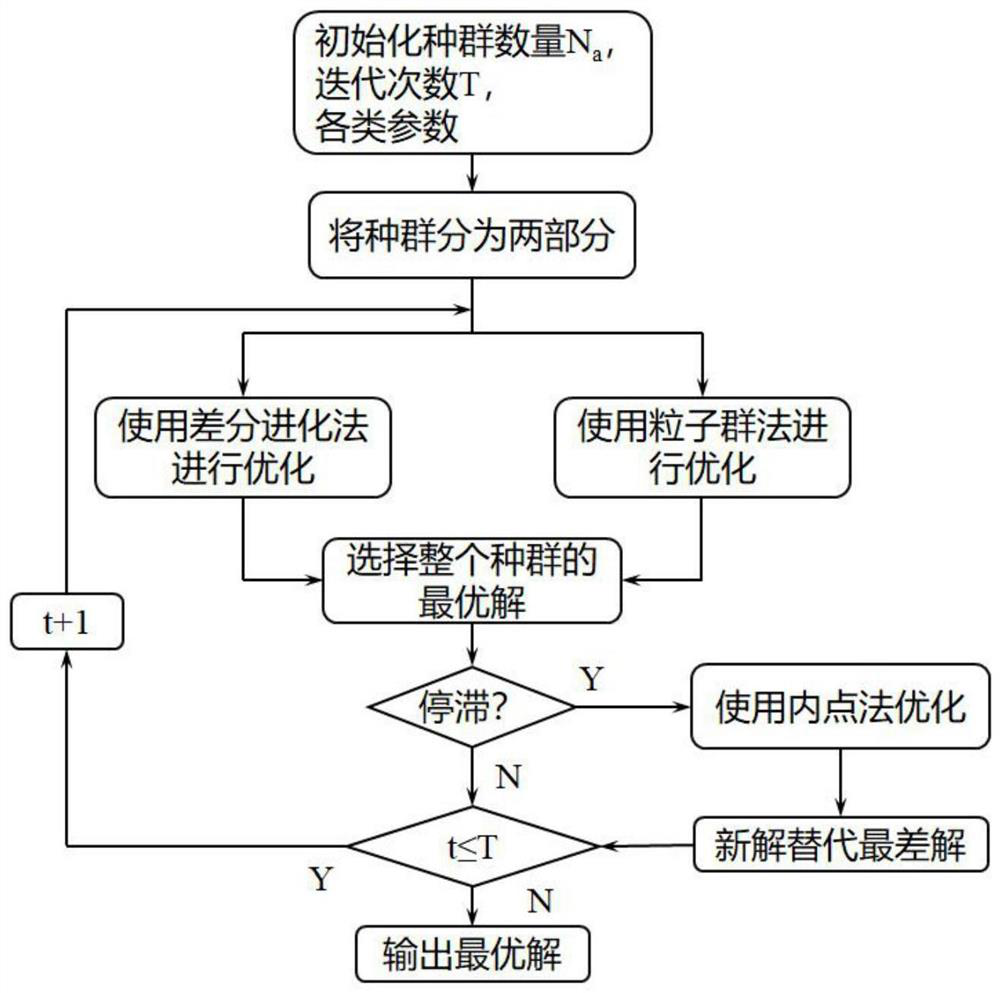
[0069] An articulated coordinate measuring machine calibration method based on IPDE algorithm is used for kinematic parameter calibration of a six-degree-of-freedom articulated coordinate measuring machine, and specifically includes the following steps:
[0070] Step 1: Establish the mathematical model of the articulated coordinate measuring machine.
[0071] According to the modeling theory of the articulated coordinate measuring machine, the modeling is carried out according to the commonly used DH model, as shown in formula (1)
[0072]
[0073] In formula (1), θ i is the joint rotation angle of the i-th joint; θ 0,i is the encoder deflection angle at the initial position of the i-th joint; α i is the torsion angle of the joint on the i-th member; a i is the member offset of the i-th joint; d i is the length of the i-th rod. i is the joint serial number, ranging from 1 to 6. l is the length of the pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More