

Indoor pedestrian navigation attitude estimation method based on foot-worn inertia measurement unit
An inertial measurement unit and attitude estimation technology, applied in the field of pedestrian navigation, can solve problems such as difficult to provide
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] An embodiment of the present invention provides a foot-mounted inertial measurement unit-based indoor pedestrian navigation attitude estimation method, which is used to improve the technical problem that it is difficult to provide accurate attitude information in the existing methods.
[0056] The general idea of the technical solution in the embodiment of the application is as follows:
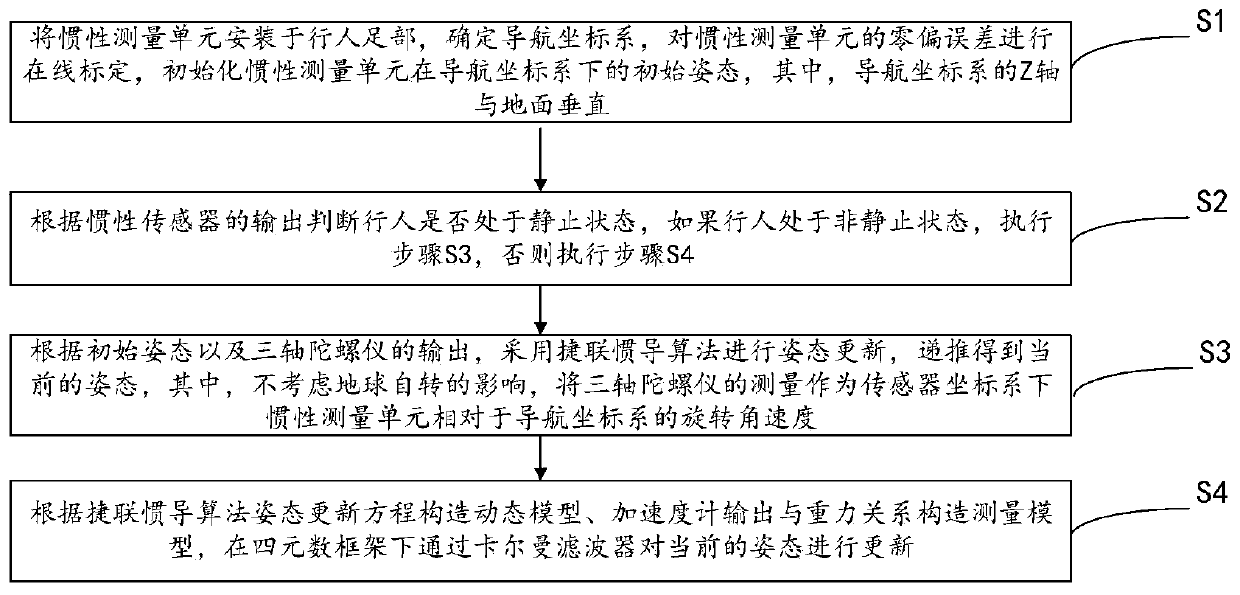
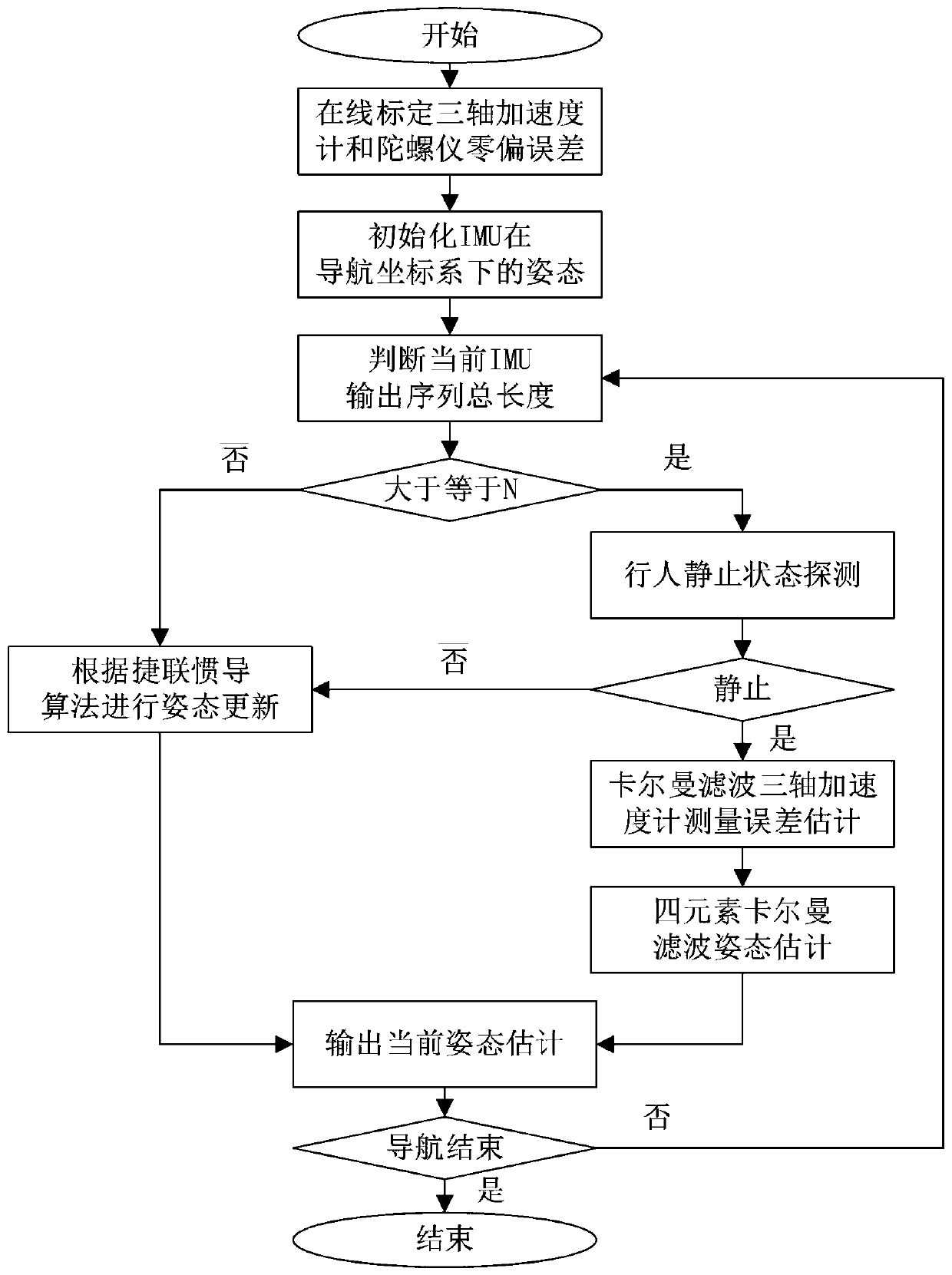
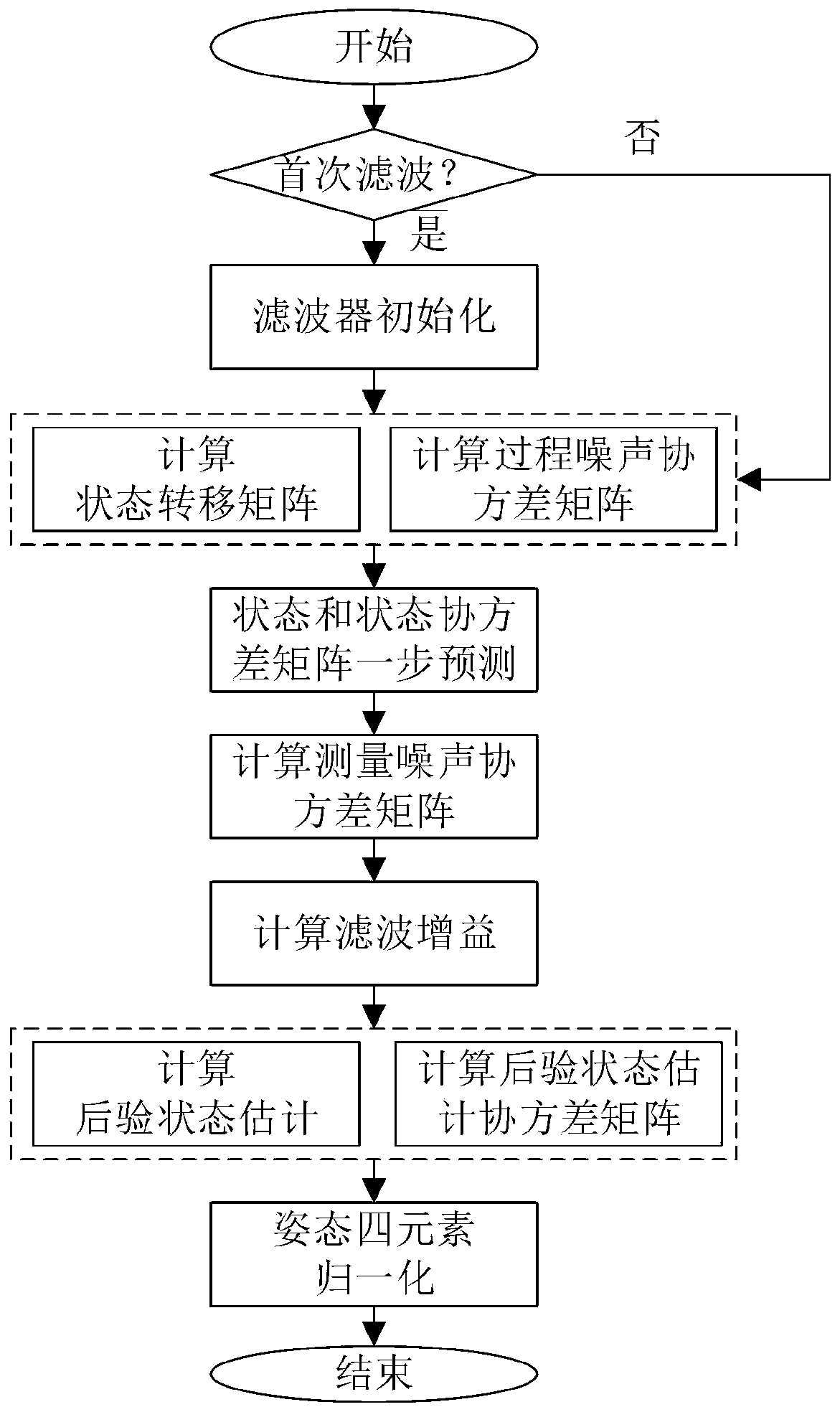
[0057] Provides an attitude estimation method for indoor pedestrian navigation. This method uses the accelerometer output in the static state during the pedestrian walking process to construct attitude observations. Under the four-element framework, the attitude estimation of the strapdown inertial navigation algorithm is corrected through the Kalman filter. , which can realize the effective estimation of pedestrian pose in any navigation coordinate system.
[0058] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More