

Interactive control method of robots
An interactive control and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as poor robot interaction experience, achieve the effect of enriching interaction types and improving interaction experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
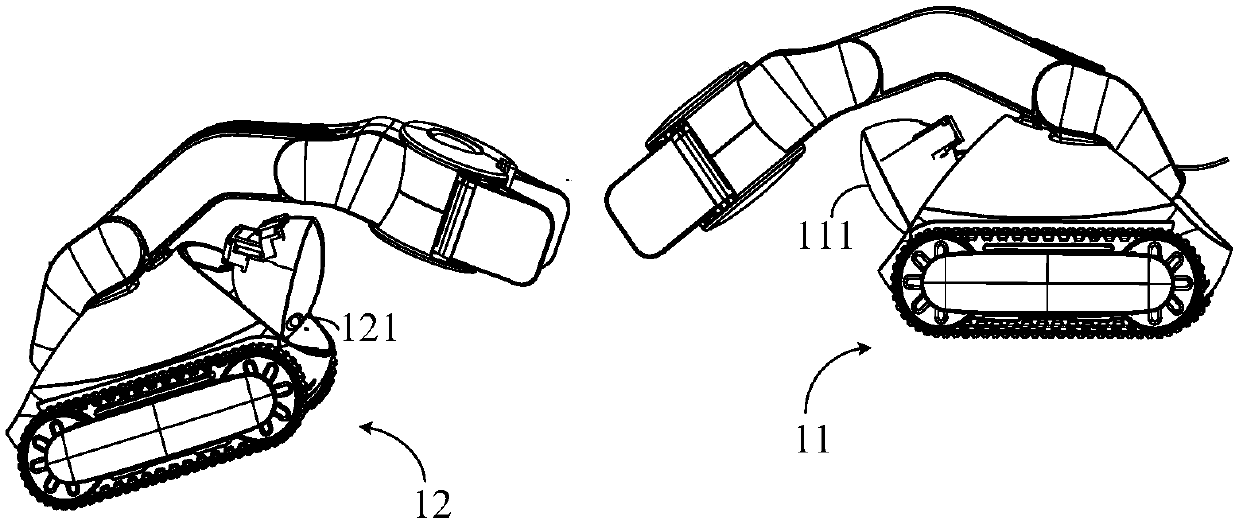
[0065] refer to Figure 11 , the first embodiment of the robot interaction control method of the present application is a method embodiment when the above-mentioned features of the robot interaction system embodiment of the present application include action features. The first embodiment of the robot interactive control method of the present application, the features include action features, and the method includes:
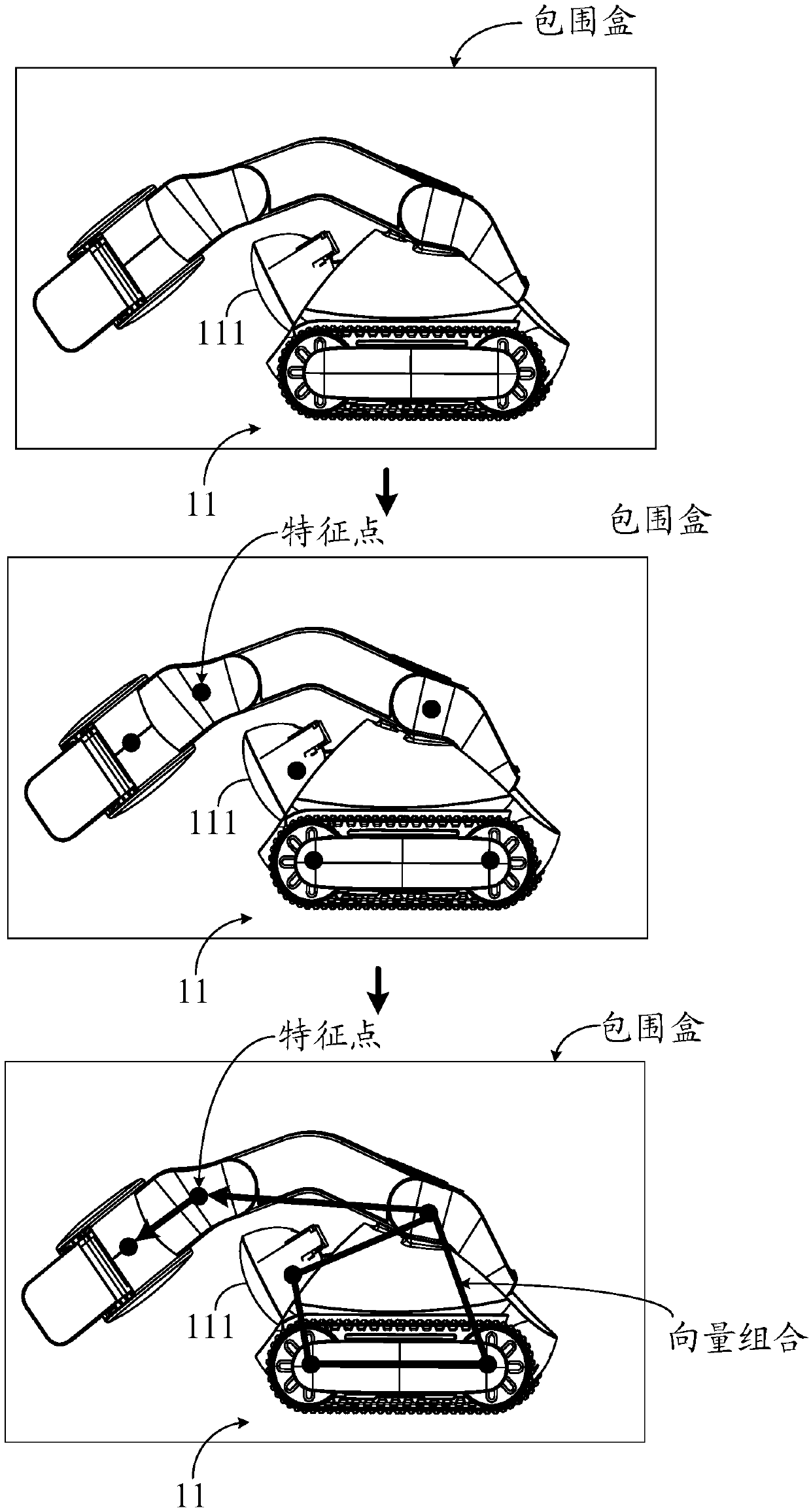
[0066] S11: Perform visual recognition on the features of the first robot.
[0067] S11a: Determine whether the position and / or yaw angle of the first robot and the position and / or yaw angle of the second robot satisfy a preset relative relationship.
[0068] If the relative relationship is not satisfied, path planning is performed on the second robot, and the second robot is controlled to move along the planned path, so that the position and / or yaw angle of the second robot after movement are consistent with the position and yaw angle of the first robot. / or ...
no. 2 example
[0077] refer to Figure 12 The second embodiment of the robot interaction control method of the present application is a method embodiment when the features in the above-mentioned embodiments of the robot interaction system of the present application include expression features. The second embodiment of the robot interactive control method of the present application, the features include expression features, and the method includes:
[0078] S21: Visually recognize the features of the first robot.
[0079] S21a: Collect multiple images of the first robot.
[0080] S21b: Identify the expression sequence displayed by the display component of the first robot in the multiple images collected.
[0081] S21c: Determine the expression feature of the first robot according to the expression sequence.
[0082] S22: Control the second robot to execute a corresponding interaction strategy for the first robot according to the identified features.
[0083] Optionally, the interaction st...
no. 3 example
[0085] refer to Figure 13 , the third embodiment of the robot interaction control method of the present application is the embodiment of the method when the features in the above embodiments of the robot interaction system of the present application include identity features. The third embodiment of the robot interactive control method of this application, the features include identity features, and the method includes:
[0086] S31: Perform visual recognition on the features of the first robot.
[0087] S31a: Collect images of the first robot.
[0088] S31b: Identify the logo pattern carried by the first robot in the collected image.
[0089] S31b1: Extract the identification pattern to be recognized from the collected image.
[0090] S31b2: Decompose the identification pattern to be recognized into multiple pattern elements to be matched.
[0091] S31b3: Match the pattern elements to be matched with multiple standard pattern elements, wherein different standard pattern ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More