

Robot buffering foot with adjustable pretightening force
A robot and spring pre-tightening force technology, applied in the field of robot buffer feet, can solve problems such as large impact, and achieve the effects of reducing motion inertia, simple structural design, and convenient adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to illustrate the technical scheme and technical purpose of the present invention, the present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the embodiments of the present invention are only used to illustrate the present invention and not to limit the scope of the present invention. The methods for the specific conditions not indicated in the following examples are usually processed according to conventional conditions, or according to the conditions suggested by the corresponding manufacturer.
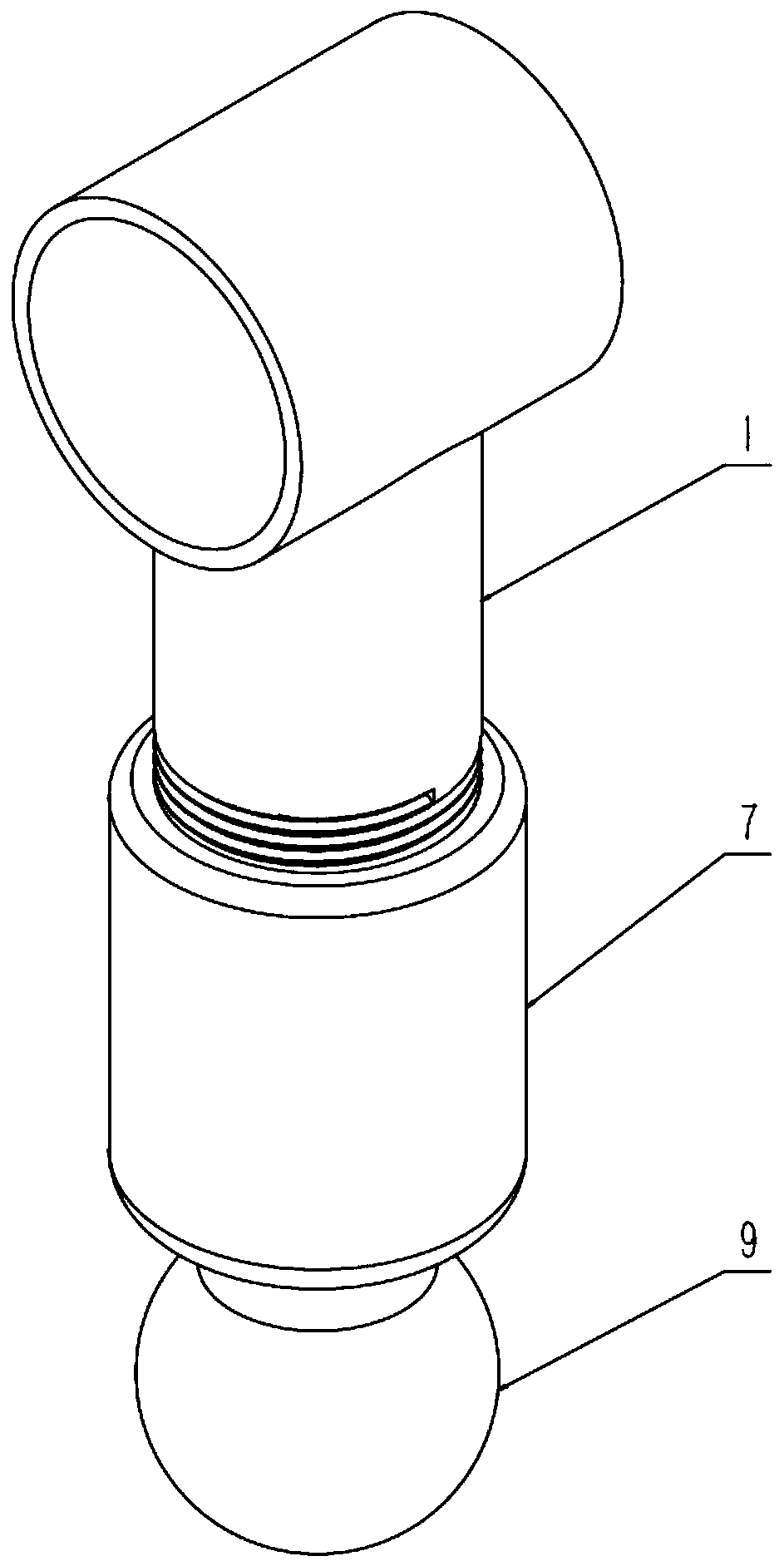
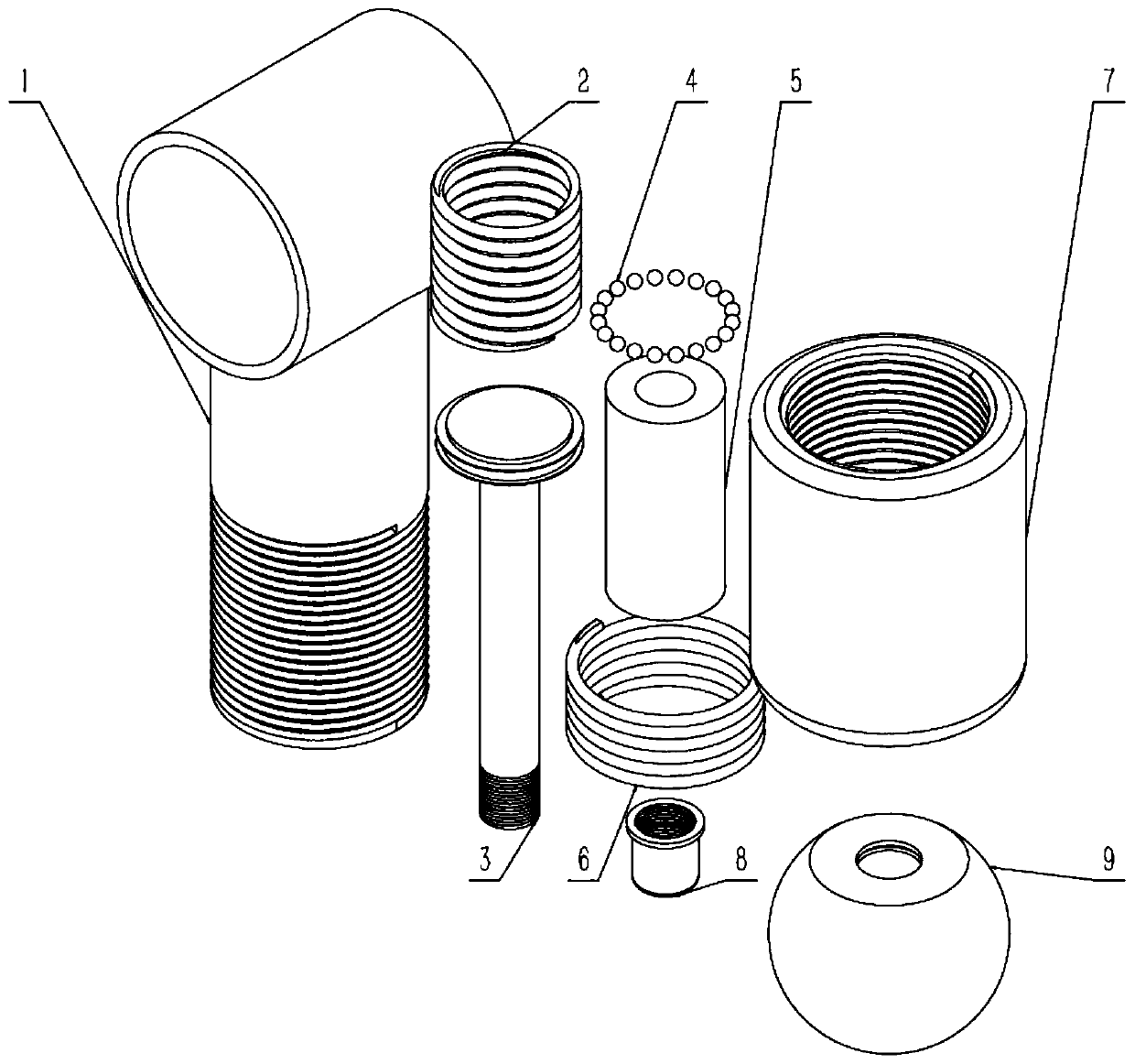
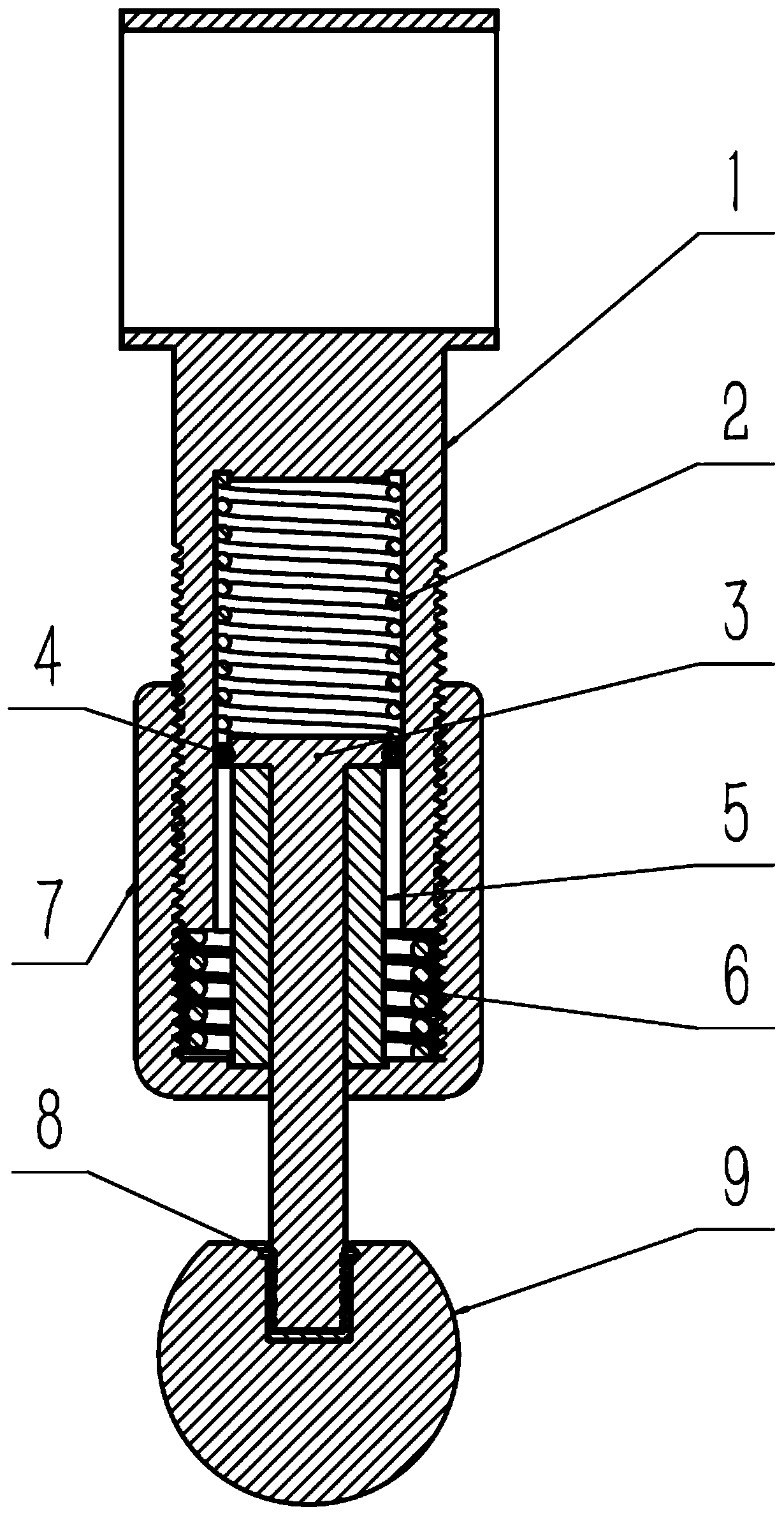
[0030] to combine figure 1 , figure 2 and image 3 , a robot buffer foot with adjustable spring preload of the present invention, including foot base joint 1, foot end buffer spring 2, sole support rod 3, preload adjustment buffer sleeve 5, tightening sleeve anti-loosening spring 6, Pretightening adjustment tightening sleeve 7, foot ball connection sleeve 8, foot ball...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More