

Miniature underwater robot-mounted hydrophone autonomous formation system and control method
A technology of hydrophones and robots, which is applied in control/adjustment systems, height or depth control, non-electric variable control, etc., and can solve the problems of formation arrays that cannot swim autonomously, low degrees of freedom and autonomy, and large functional limitations. problems, to achieve the effect of high precision, simple operation, and convenient large-scale management
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
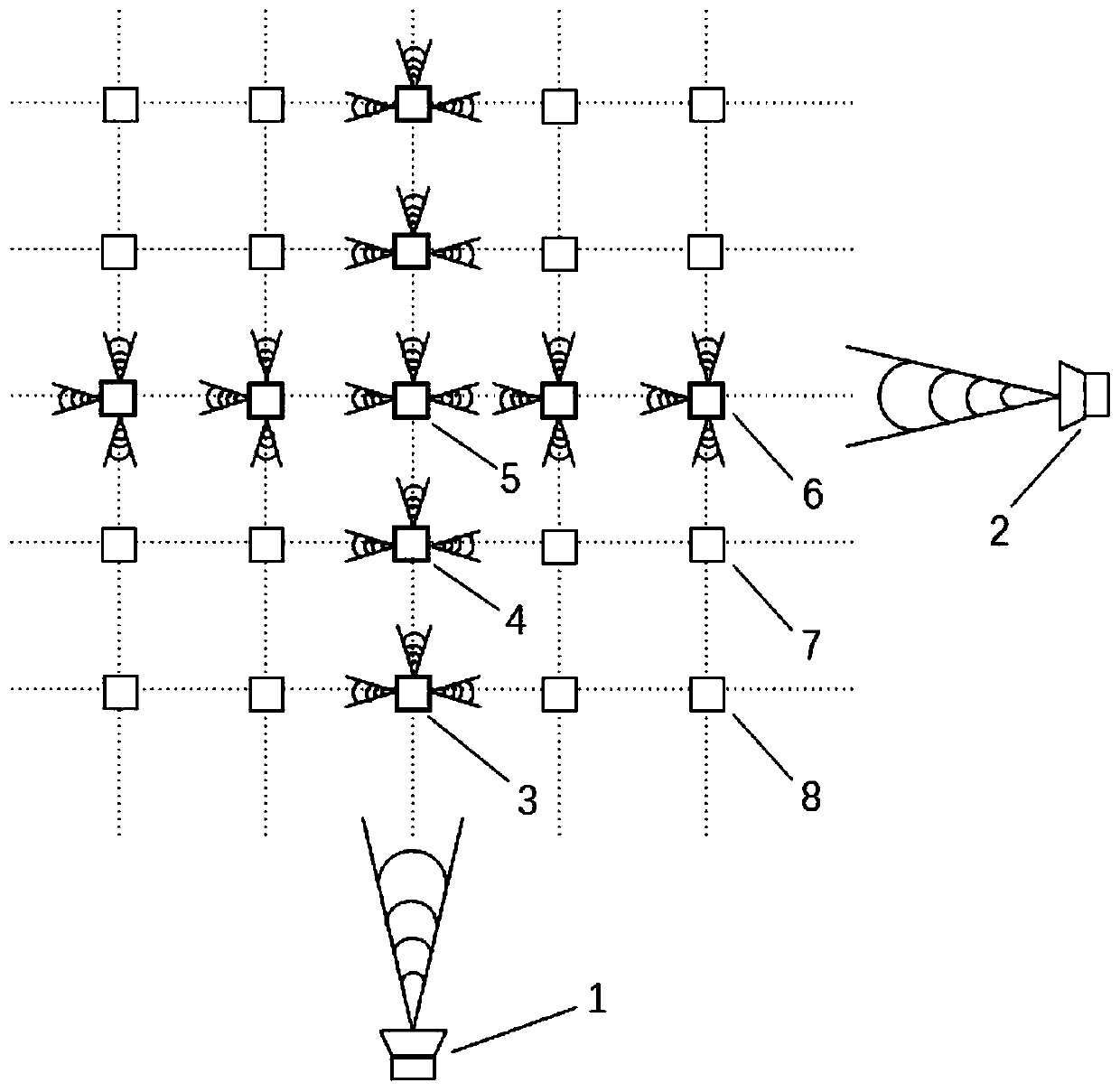
[0040] Embodiments of the present invention provide an autonomous formation system and control method for micro underwater robots carrying hydrophones, which are used to improve the degree of freedom of hydrophone arrays and the efficiency of large-scale management.
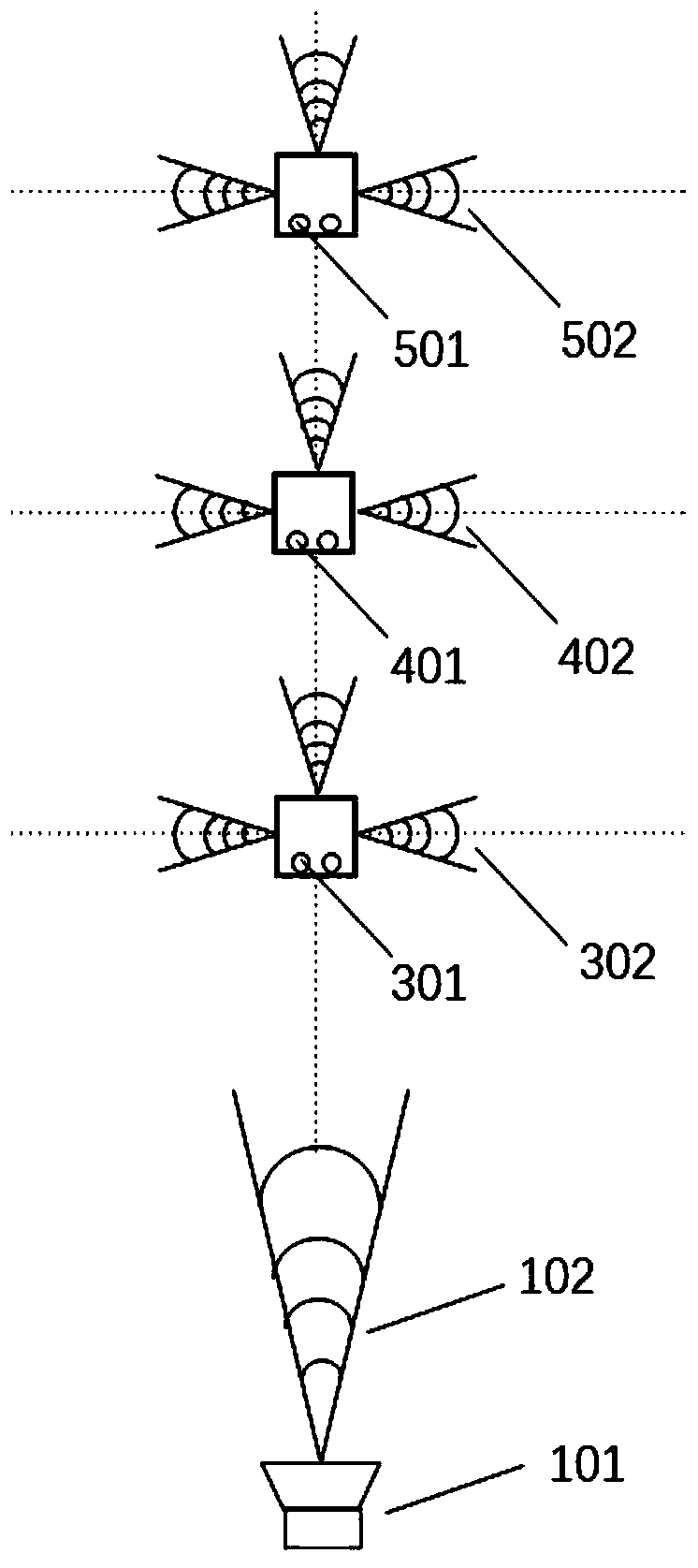
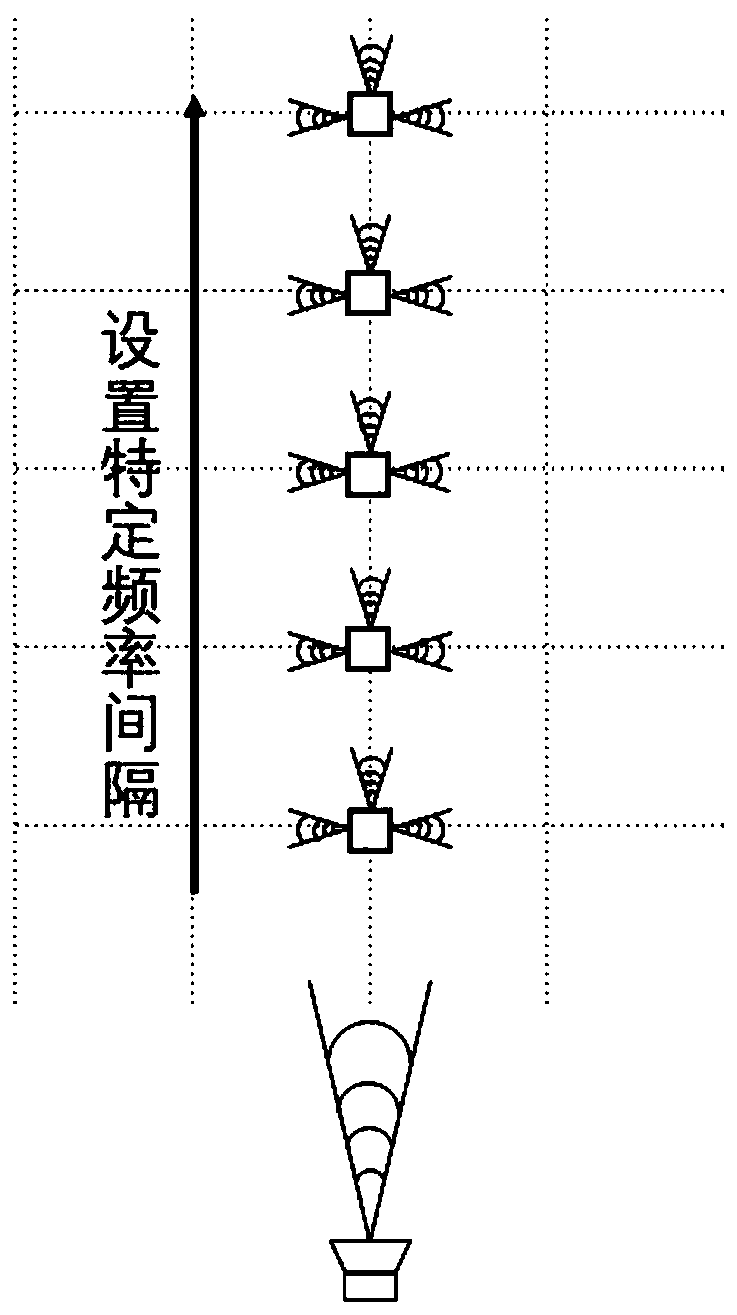
[0041] The miniature underwater robot carrying hydrophone autonomous formation system of the embodiment of the present invention, its basic device comprises a base station, the leader miniature underwater robot carrying hydrophone (hereinafter referred to as the captain), the team member micro underwater robot carrying hydrophone (here...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More