

Pseudo-four-degree-of-freedom parallel robot adopting vertical joints
A technology of vertical joints and degrees of freedom, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing the manufacturing cost of robots, and achieve the effects of easy installation and maintenance, reduced manufacturing costs, and fast movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings.
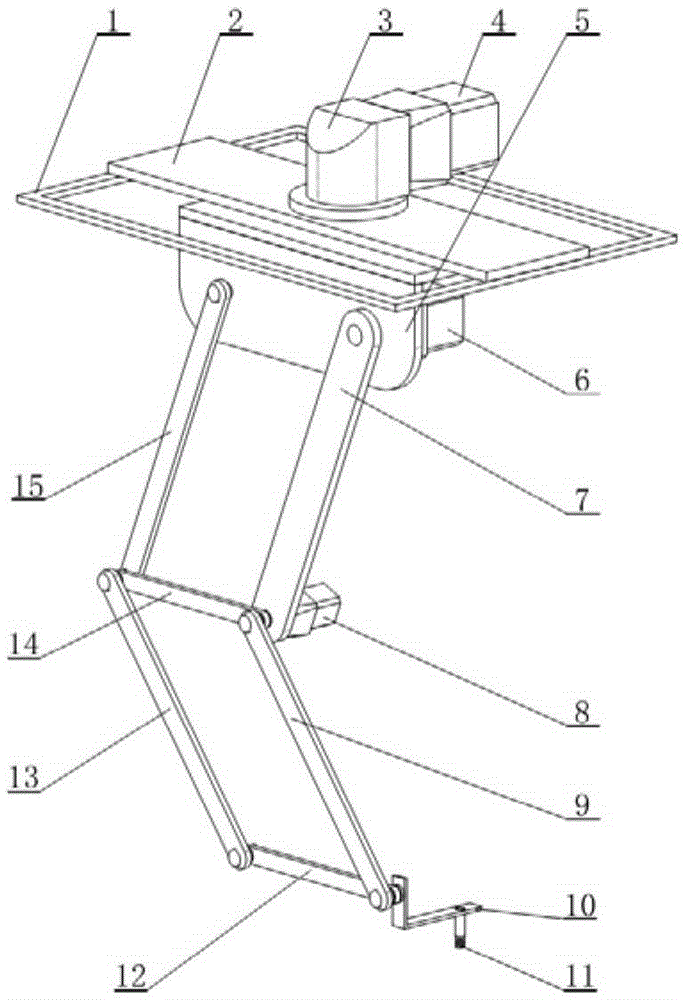
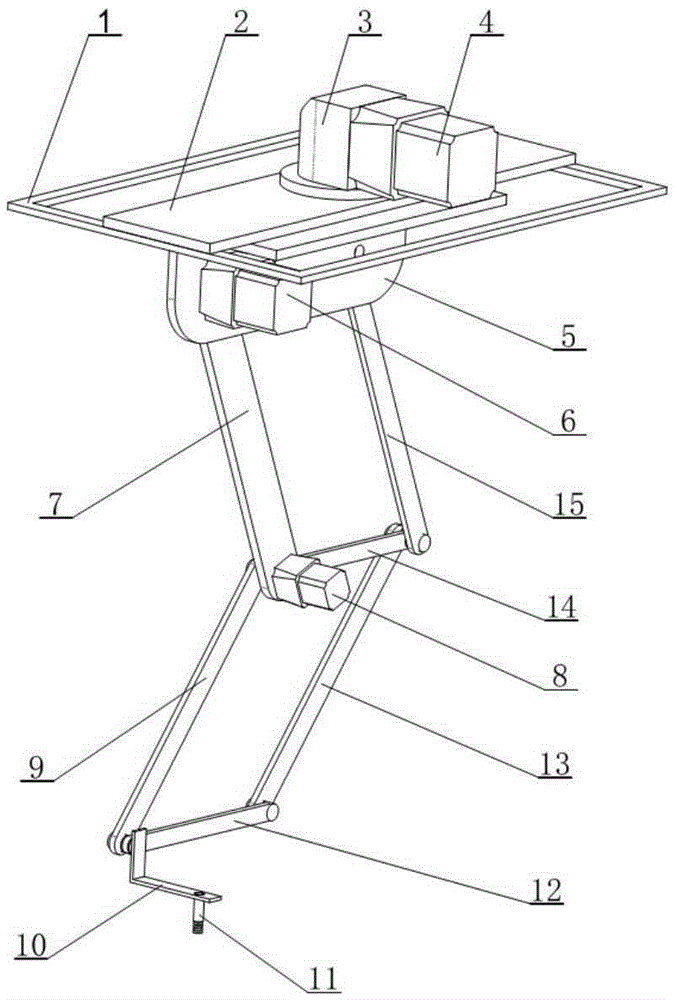
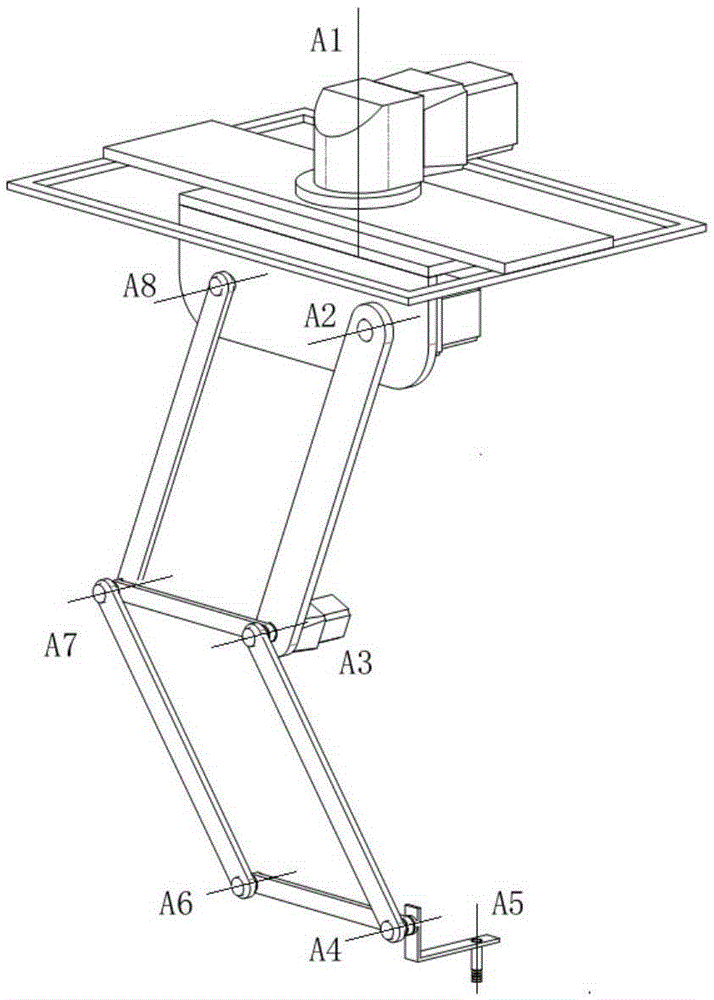
[0025] Such as Figure 1 to Figure 3 As shown, the pseudo-four-degree-of-freedom parallel robot with vertical joints of the present invention includes a frame 1, a static platform 2, a rotary drive mechanism, and a two-degree-of-freedom parallel mechanism; the frame 1 is a platform at a fixed position, and the static platform 2 is fixed on the frame 1, also Fixed-position platform; the rotary drive mechanism includes an elbow reducer 3 and a first drive motor 4, the elbow reducer 3 is installed on the static platform 2, and the drive motor 4 is connected with the elbow reducer 3 for Drive the elbow reducer 3; the two-degree-of-freedom parallel mechanism includes a parallel drive mechanism, a rotating support base 5, a first motion branch chain, a second motion branch chain, a moving platform 10, and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More