Method for influencing vehicle sharp bend by removing road alignment based on trajectory data and map data
A technology of trajectory data and map data, which is applied in the traffic control system of road vehicles, traffic flow detection, instruments, etc., can solve problems such as not considering the influence of road alignment, and achieve the effect of reducing traffic accidents and ensuring traffic safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
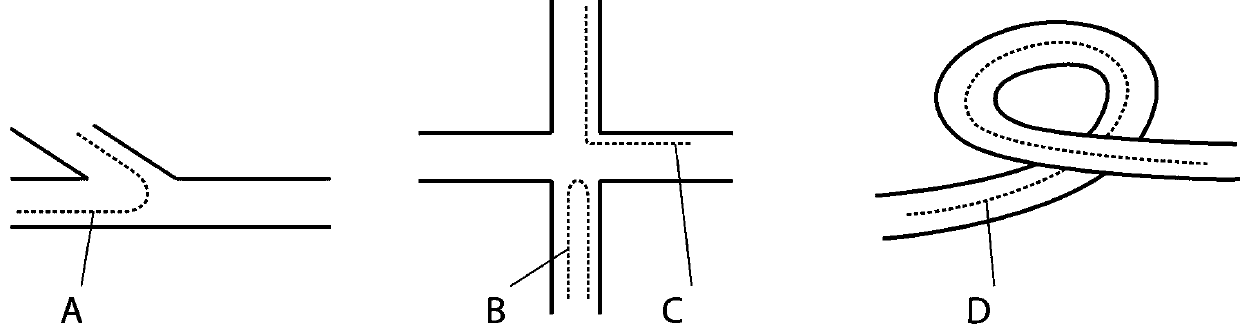
[0029] Such as figure 1 Shown in state A, the realization of the present invention passes through a kind of method based on trajectory data and map data to remove the influence of road alignment on sharp turns of vehicles, comprising the following steps:
[0030] A. Data processing: data cleaning and reconstruction will be performed on the GPS or Beidou positioning data received from vehicle A, and abnormal data and redundant data will be removed;
[0031] B. Matching of trajectory data and digital map: quickly match the Beidou or GPS data processed in step A to the digital map, associate the vehicle trajectory data with the digital map, and determine the road section to which the vehicle belongs;
[0032] C. Judging sharp turns:
[0033] C1. Sampling is carried out every 1 second after the sampling interval, and within a certain period of time, the vehicle has two consecutive sampling speeds v1=32km / h, v2=32km / h;
[0034] C2. The absolute value of the azimuth angle change b...
Embodiment 2
[0041] Such as figure 1 As shown in state B, the realization of the present invention is based on a method for removing the influence of road alignment on sharp turns of vehicles based on track data and map data, comprising the following steps:
[0042] A. Data processing: clean and reconstruct the GPS or Beidou positioning data received from vehicle B, and remove abnormal and redundant data;
[0043] B. Matching of trajectory data and digital map: quickly match the Beidou or GPS data processed in step A to the digital map, associate the vehicle trajectory data with the digital map, and determine the road section to which the vehicle belongs;
[0044] C. Judging sharp turns:
[0045] C1. Sampling is carried out every 2 seconds after the sampling interval. In a certain period of time, the vehicle has two consecutive sampling speeds v1=35km / h, v2=40km / h;
[0046] C2. The absolute value of the azimuth angle change between the next sampling time and the previous sampling time ...
Embodiment 3
[0051] Such as figure 1 Shown in state C, the realization of the present invention passes through a kind of method based on trajectory data and map data to remove the influence of road alignment on sharp turns of vehicles, comprising the following steps:
[0052] A. Data processing: clean and reconstruct the GPS or Beidou positioning data received from vehicle C, and remove abnormal and redundant data;
[0053]B. Matching of trajectory data and digital map: quickly match the Beidou or GPS data processed in step A to the digital map, associate the vehicle trajectory data with the digital map, and determine the road section to which the vehicle belongs;
[0054] C. Judging sharp turns:
[0055] C1. Sampling is carried out every 1 second after the sampling interval, and within a certain period of time, the vehicle has two consecutive sampling speeds v1=45km / h, v2=40km / h;
[0056] C2. The absolute value of the azimuth angle change between the next sampling time and the previous ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com