

A flexible robot for minimally invasive abdominal surgery
A minimally invasive surgical and robotic technology, applied in the field of retaining rigid drive devices and flexible robots, it can solve the problems of limited degrees of freedom, low fault tolerance, and single function.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
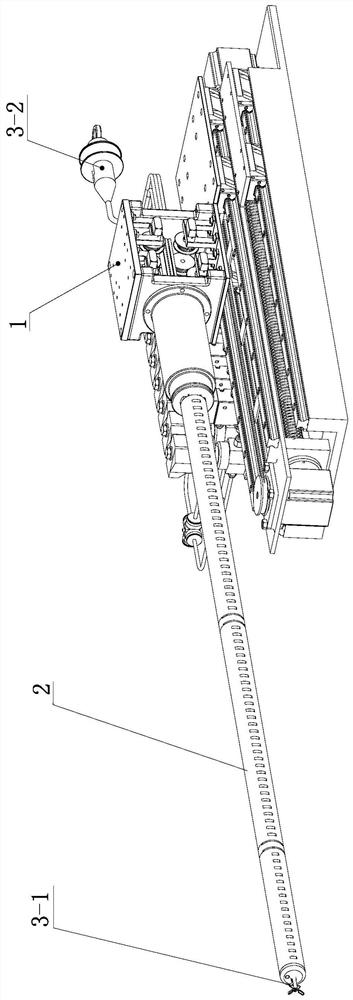
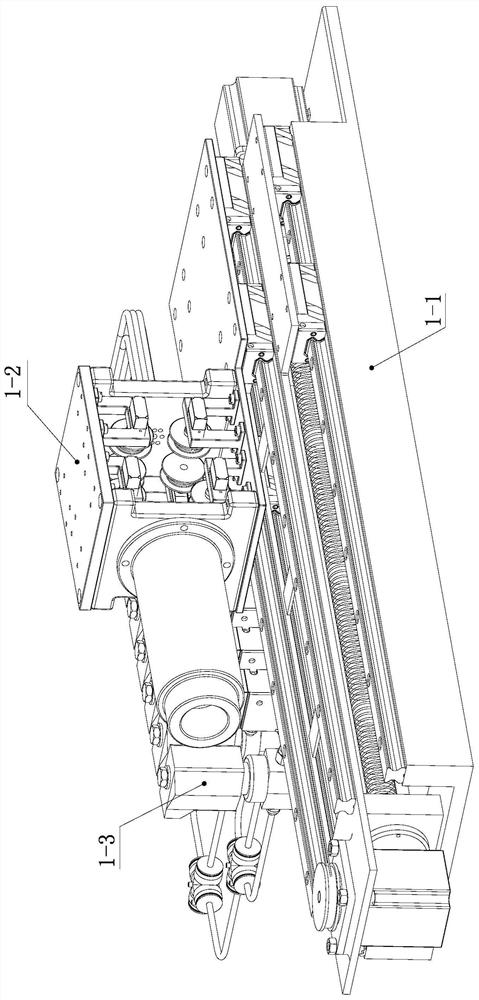
[0054] see figure 1 , figure 2 and Figure 36 As shown, a flexible robot for abdominal minimally invasive surgery, it includes end surgical forceps mechanism; it also includes drive system 1 and soft robot body 2; drive system 1 includes linear feed system 1-1, wire drive system 1-2 and the air drive system 1-3; the line drive system 1-2 is connected with the linear feed system 1-1, the soft robot body 2 is installed on the line drive system 1-2, and the air drive system 1-3 passes through the line The air pipe of drive system 1-2 supplies air to the main body 2 of the soft robot, the air drive system 1-3 and the line drive system 1-2 control the deformation of the main body of the soft robot, and the linear feed system 1-1 controls the line drive system 1-2 and the software For the horizontal movement of the robot main body 2, the front-end gripper 3-1 of the terminal surgical forceps mechanism is installed on the front end of the soft robot main body 2, and the terminal h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More