

High-precision target positioning and speed measurement method based on photoelectric platform of unmanned aerial vehicle
An optoelectronic platform and target positioning technology, which is applied to devices using optical methods, navigation calculation tools, etc., and can solve problems such as many limitations in use, low positioning accuracy, and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0111] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific steps. The present invention discloses a method for high-precision target positioning and speed measurement based on an unmanned aerial vehicle photoelectric platform. The method specifically includes the following steps:
[0112] Step 1. Collect the precise longitude, latitude and altitude of the cooperative target point; plan the calibration route, which requires the UAV to maintain a constant speed, stable heading and altitude, and zero pitch and roll angles.
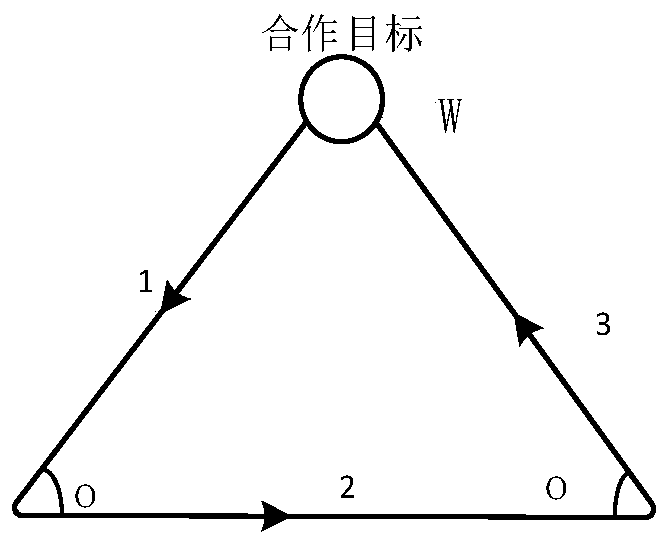
[0113] The planning of the calibration route should consider the relative position of the UAV and the cooperative target, so that the UAV can make full use of the four directions of front, back, left, and right to locate the cooperative target. The calibration route should be as follows: figure 1 The route shown or a route similar to it. In the first route 1 or the third route 3, the targe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More