

Local path planning method for intelligent unmanned system based on dual back propagation neural network
A local path planning and neural network technology, applied in control/regulation systems, road network navigators, two-dimensional position/channel control, etc., can solve the problem of the inability to obtain the global optimal solution and the unmanned system's continuous and accurate obstacle avoidance , planning times and other problems, to achieve the effect of improving collision avoidance performance and efficiency, reducing the number of decision-making and computing burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention takes a typical unmanned system as an example to describe the specific implementation. The present invention will be described in further detail below in conjunction with the accompanying drawings and specific examples.
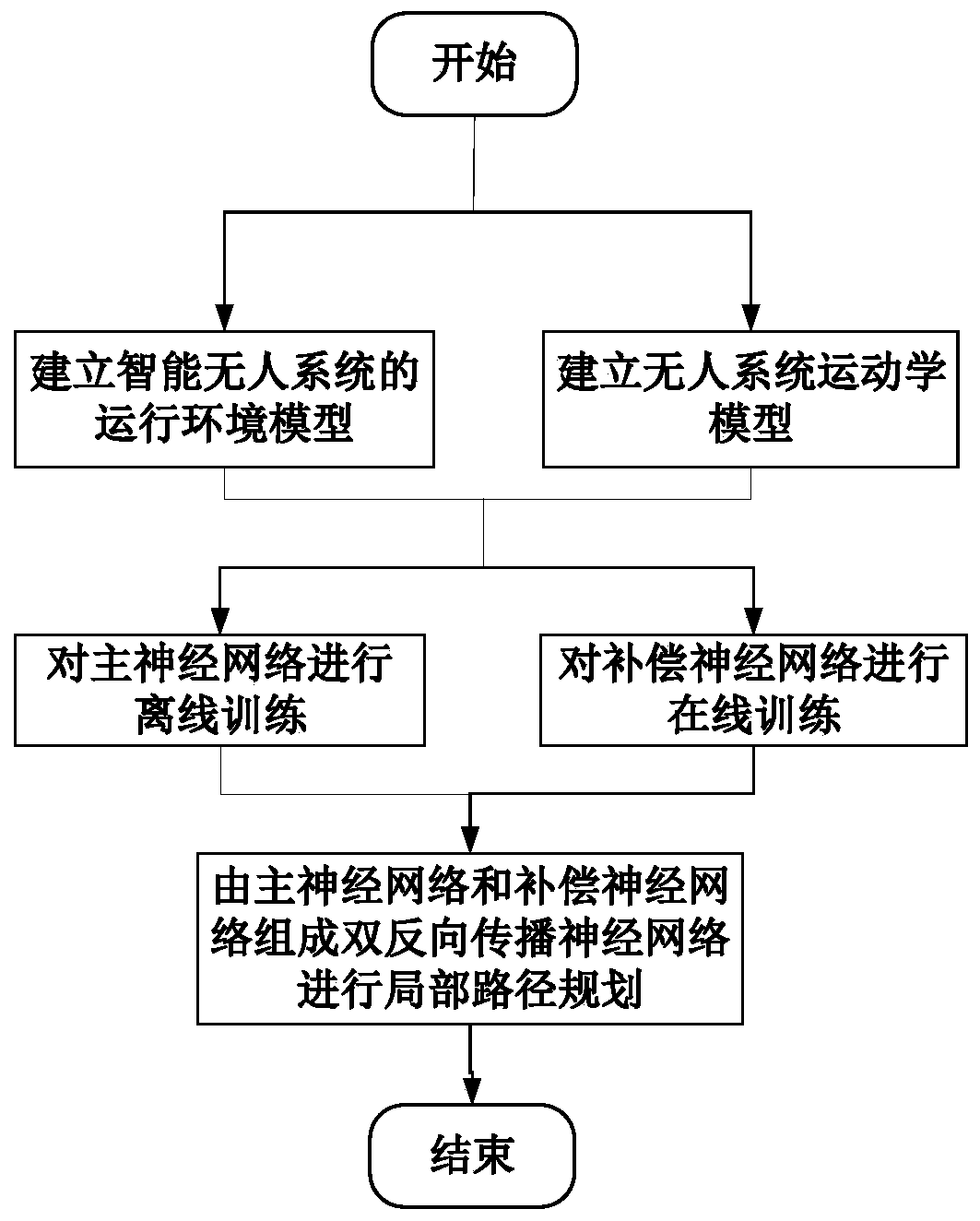
[0052] Such as figure 1 Shown, the present invention realizes steps as follows:
[0053] The first step is to establish an environment model for the operation of the intelligent unmanned system:
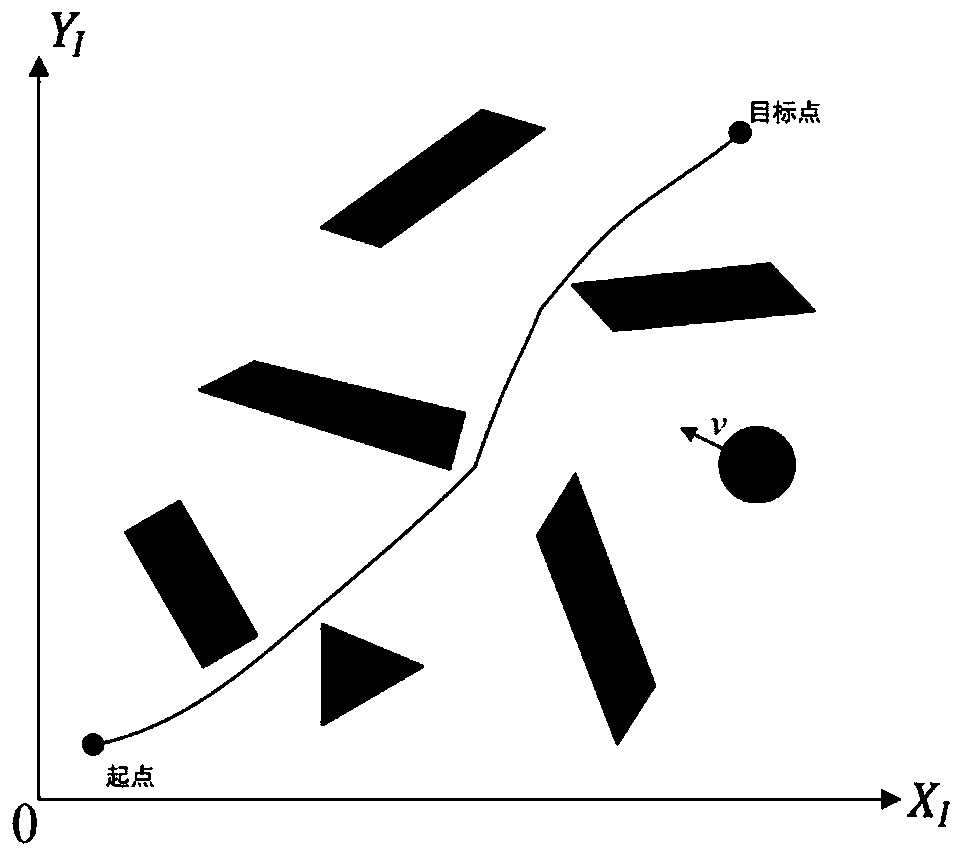
[0054] Such as image 3 As shown in , the light gray starting point and dark gray target point represent the starting point and target point of the unmanned system in the global coordinate system, respectively. A circle with a velocity vector represents a moving obstacle, and the planned global path is image 3 The line connecting the starting point and the target point in the middle, and the polygons distributed on both sides of the planned path represent static obstacles.
[0055] The goal of this path planning is to make the trip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More