

Single-driving-force multi-freedom-degree foot device realizing self-adaption to landform
A foot device and self-adaptive technology, applied in the field of robotics, can solve the problems of weak ability to adapt to various terrains, small carrying capacity, poor maneuverability, etc., to achieve simple adaptation to various terrains, absorb sudden shocks and high-frequency vibrations, Improves the effect of rapid motor ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
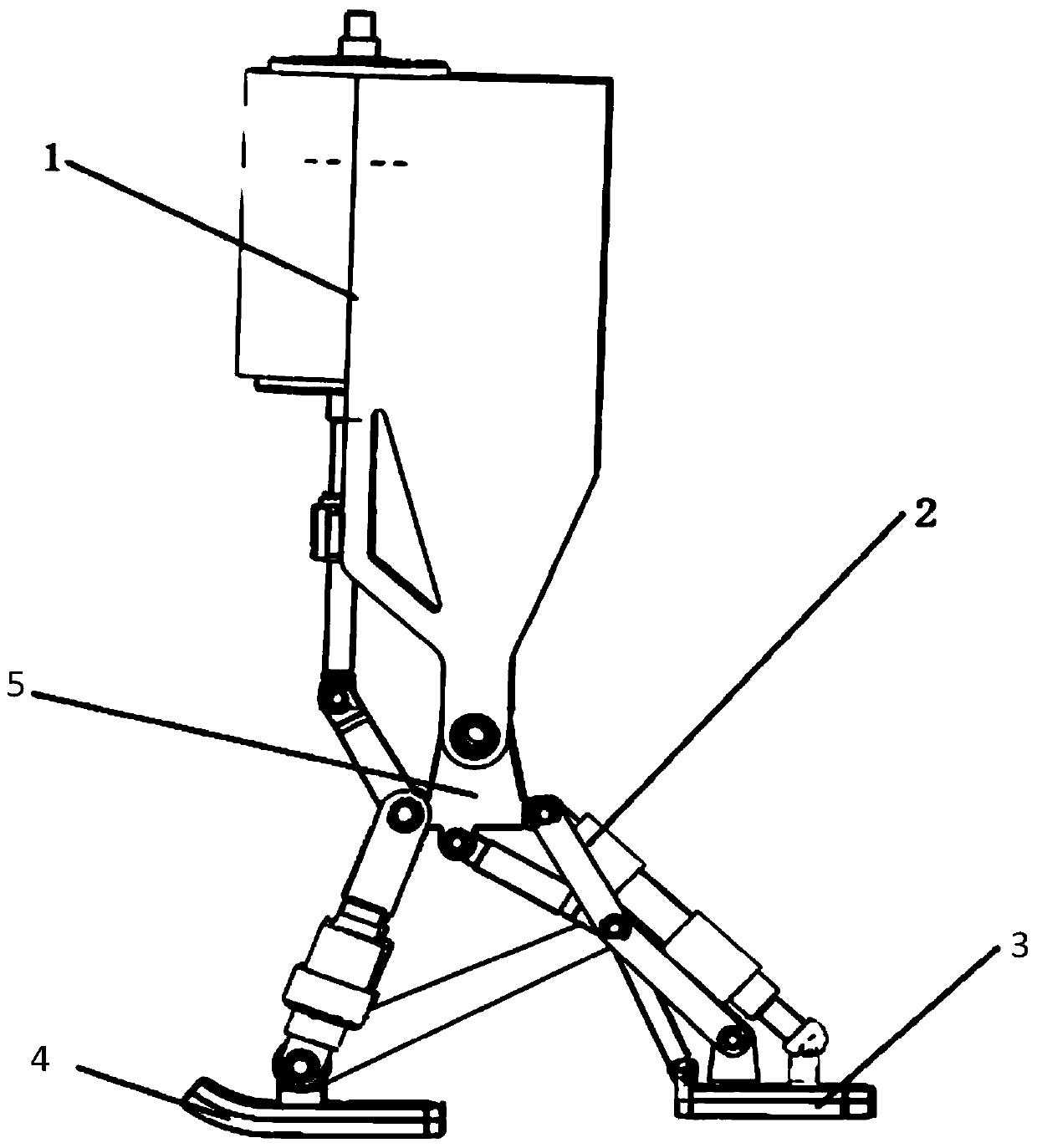
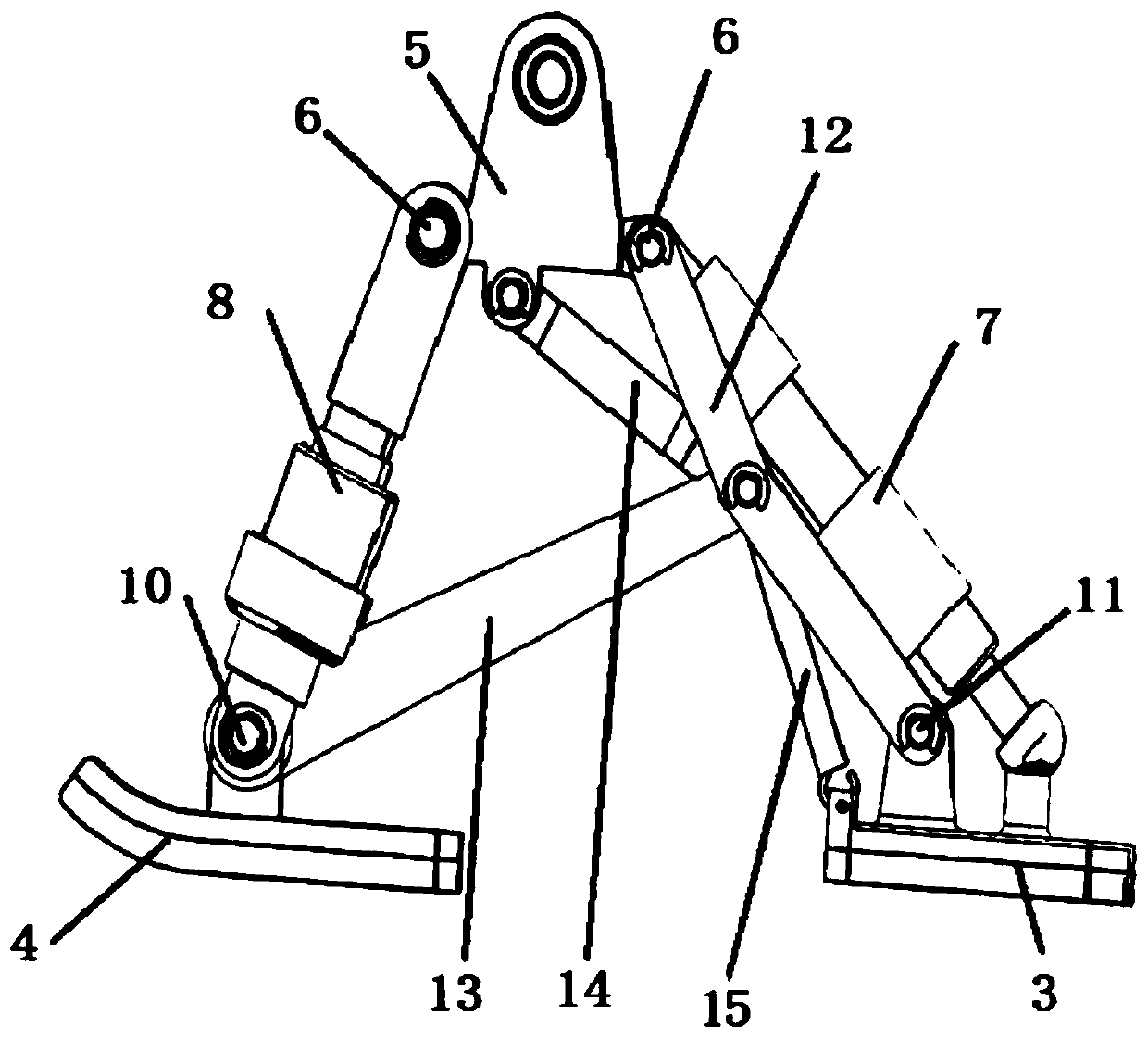
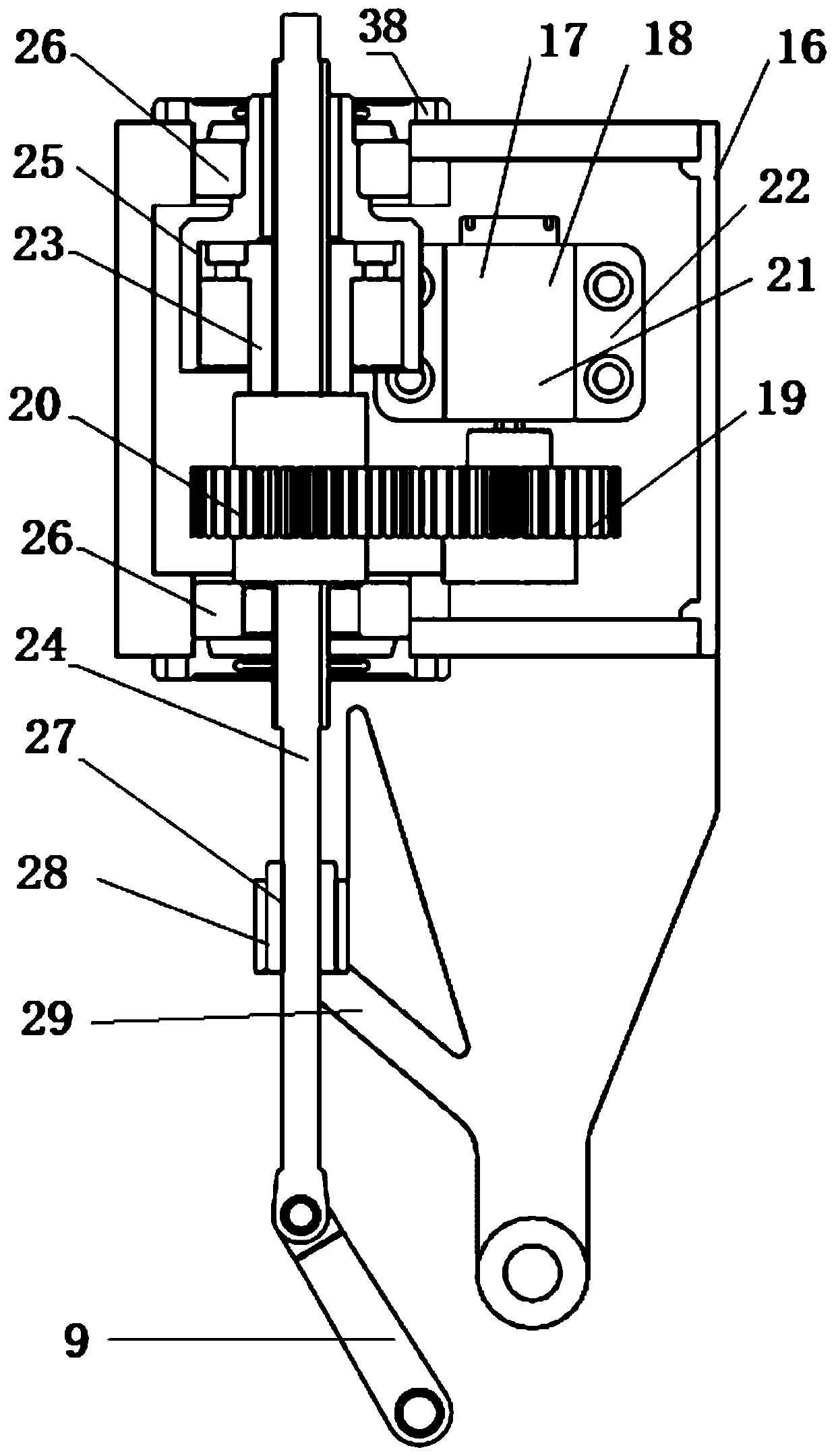
[0034] A multi-degree-of-freedom foot device with a single driving force that can adapt to the terrain, including a foot driver 1 and a foot four-bar linkage mechanism 2 hinged to the foot driver 1, and the foot four-bar linkage mechanism 2 is also connected to the forefoot 3 and the back sole 4, the sole four-bar linkage mechanism 2 includes the midfoot 5, the two sides of the midfoot 5 are respectively hinged with the forefoot buffer 7 and the rear sole buffer 8 through the midfoot joint 6, and the foot driver 1 passes through the connecting rod 9 It is hinged with the middle foot 5 and one side of the back sole buffer 8 is hinged; it can achieve full contact with the ground to prevent slipping, and at the same time, through the buffer and elastic components with cushioning and vibration-absorbing design, the sole of the foot and the ground can be adjusted adaptively in multiple directions The contact angle allows the soles of the feet to adapt to complex terrain conditions. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More