

Robot path planning method based on improved artificial potential field method
An artificial potential field method and path planning technology, applied in the field of mobile robots, can solve the problems of low walking efficiency at fixed steps, unreachable targets, local minimum points, etc., to reduce the number of path planning steps and reduce the possibility of collision , the effect of improving execution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
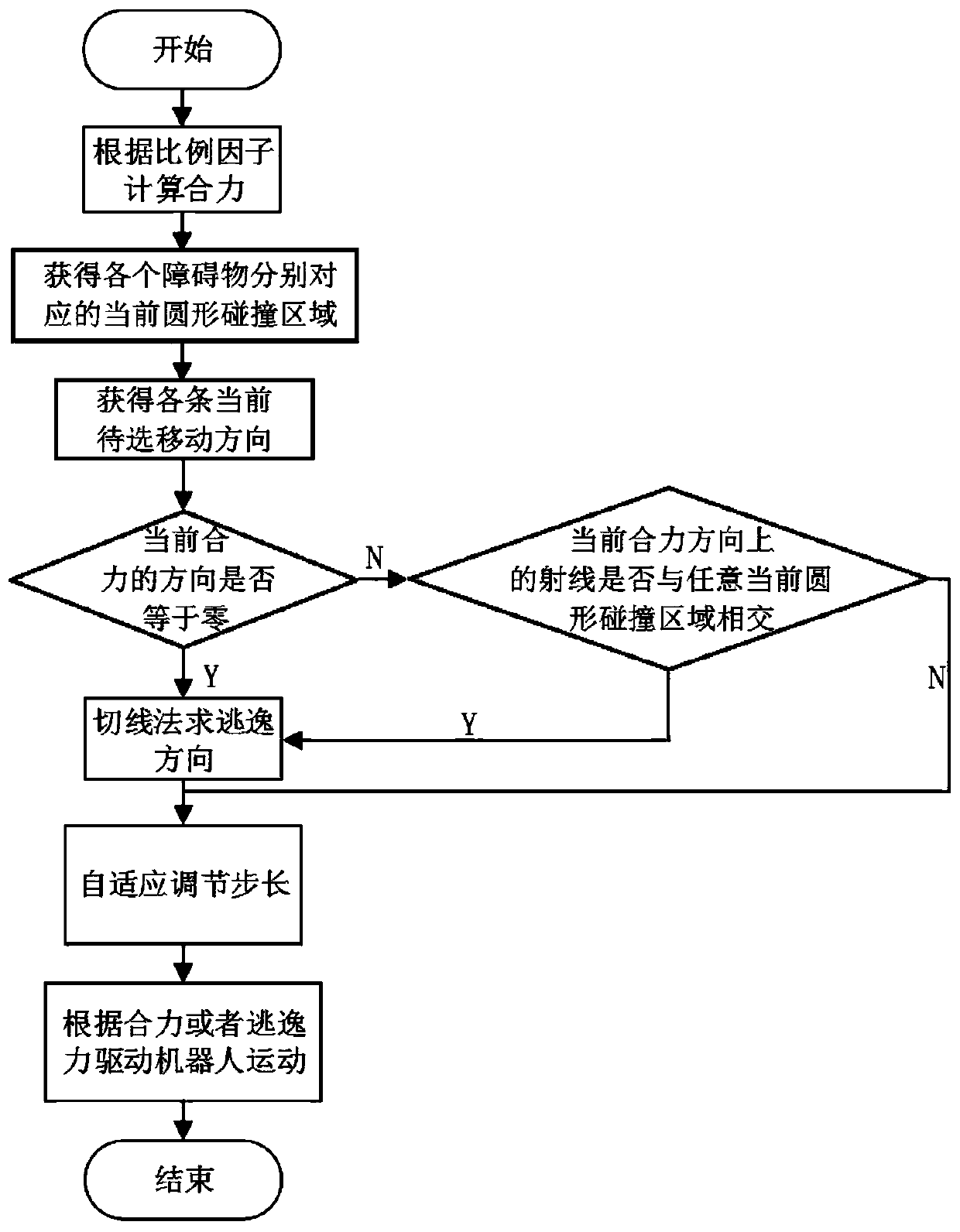
[0038] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
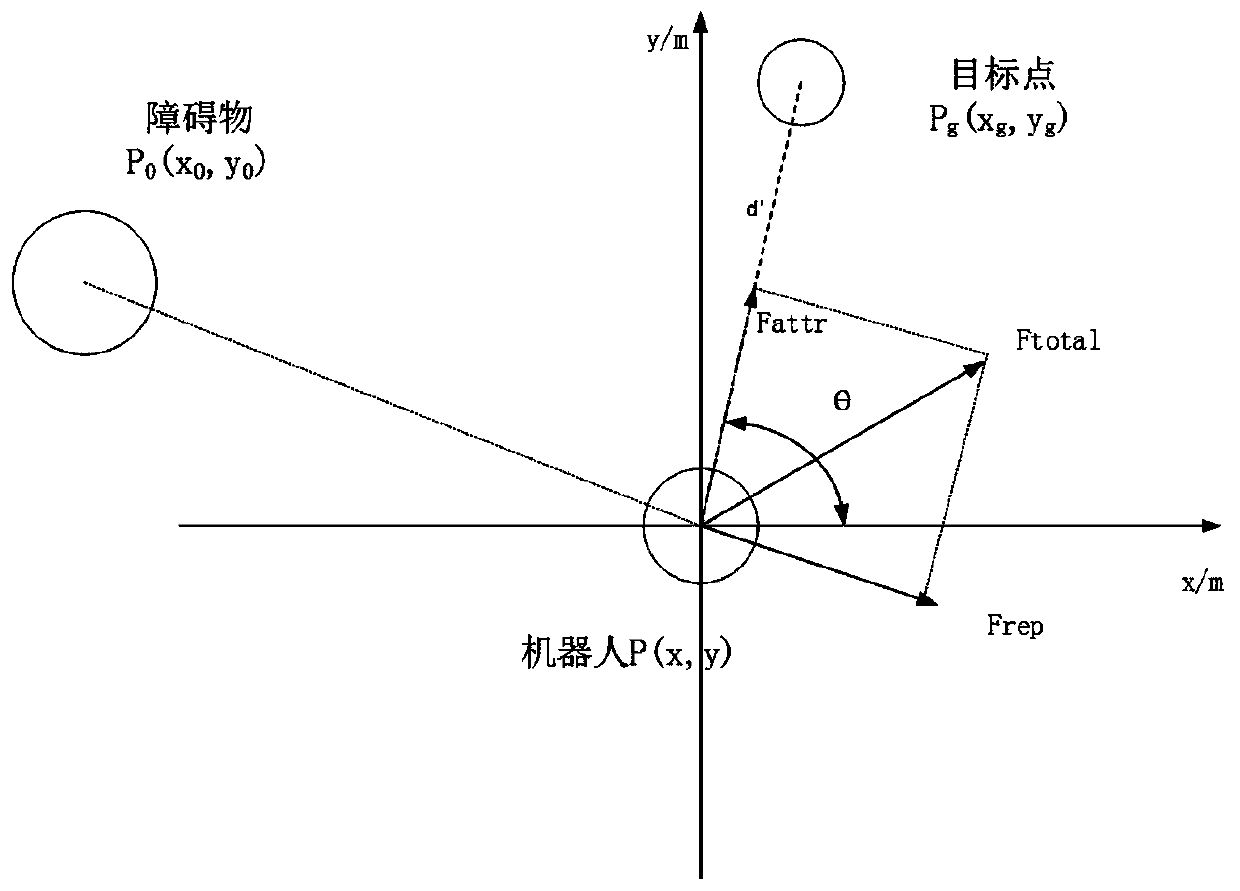
[0039] Such as figure 1 As shown, the artificial potential field method regards the movement of the robot in the environment as the movement in the virtual force field, in which the target point generates gravitational force on the object, guiding the object to move towards it, and the obstacle produces a repulsive force on the robot, preventing the object from interacting with it. Collision. The resultant force generated by the gravitational force and the repulsive force is used as the acceleration force of the robot to control the movement of the whole robot to the target point. Among them, the gravitational force of the target point on the robot decreases with the decrease of the distance, and the repulsion force of the obstacle to the robot increases with the decrease of the distance.
[0040] The present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More