

Path planning method and apparatus for robot fast collision avoidance
A path planning and robotics technology, applied in the field of high-dimensional robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
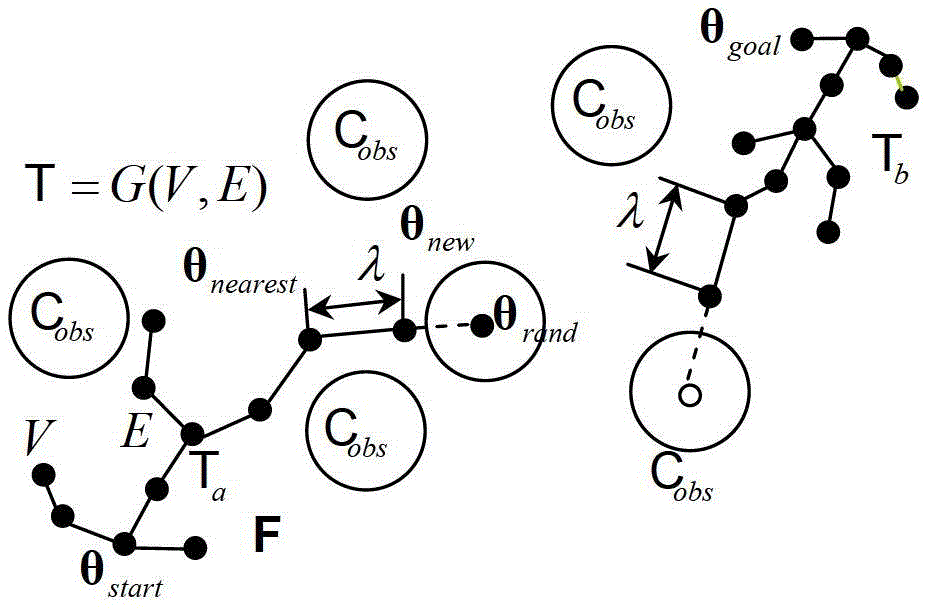
[0062] reference figure 1 , figure 1 It is a schematic diagram of a method for rapid collision avoidance of a robot provided by an embodiment of the present invention. Such as figure 1 As shown, the BBRrt algorithm is a combination of forward RRT search and backward RRT search. One tree grows from the initial configuration, and the other tree grows from the target configuration. Compared with single-tree RRT path planning, using two-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More