

An automatic grabbing and lifting device in a reactor
A reactor and automatic technology, applied in the field of reactor material irradiation, can solve problems such as debris brought into the reactor, potential safety hazards of the reactor, and health hazards.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
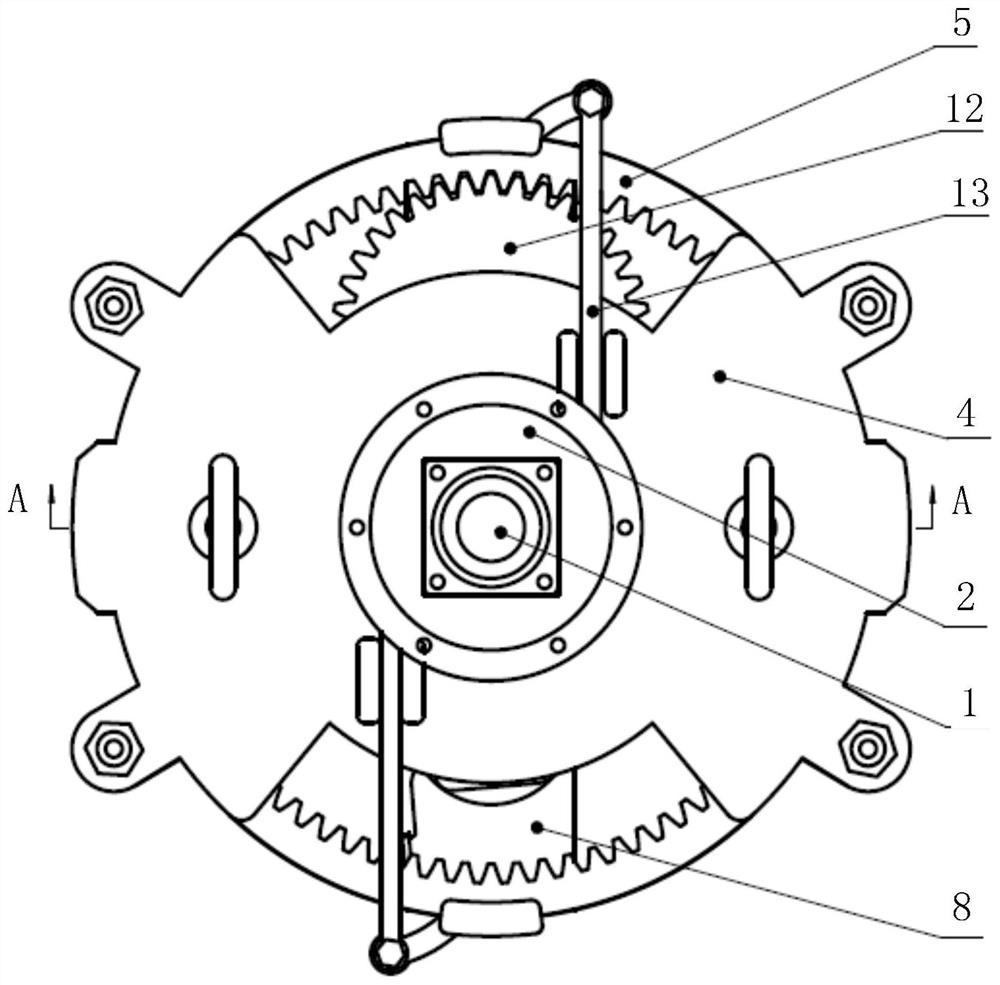
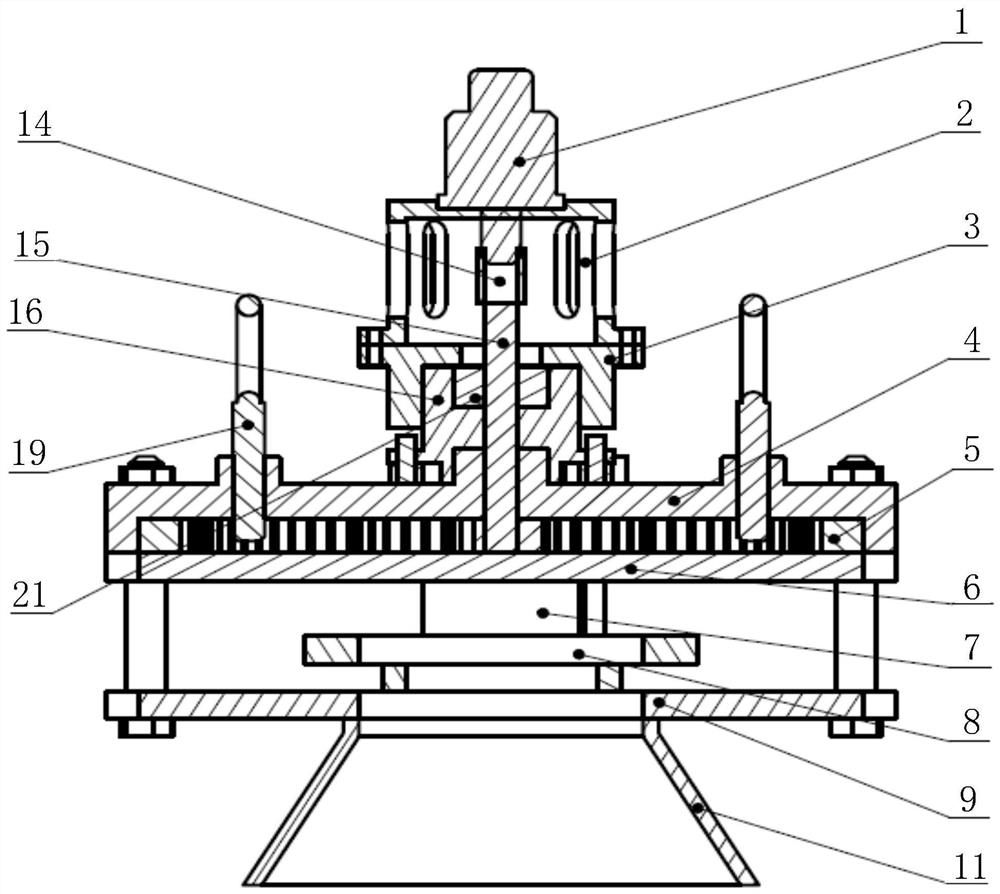
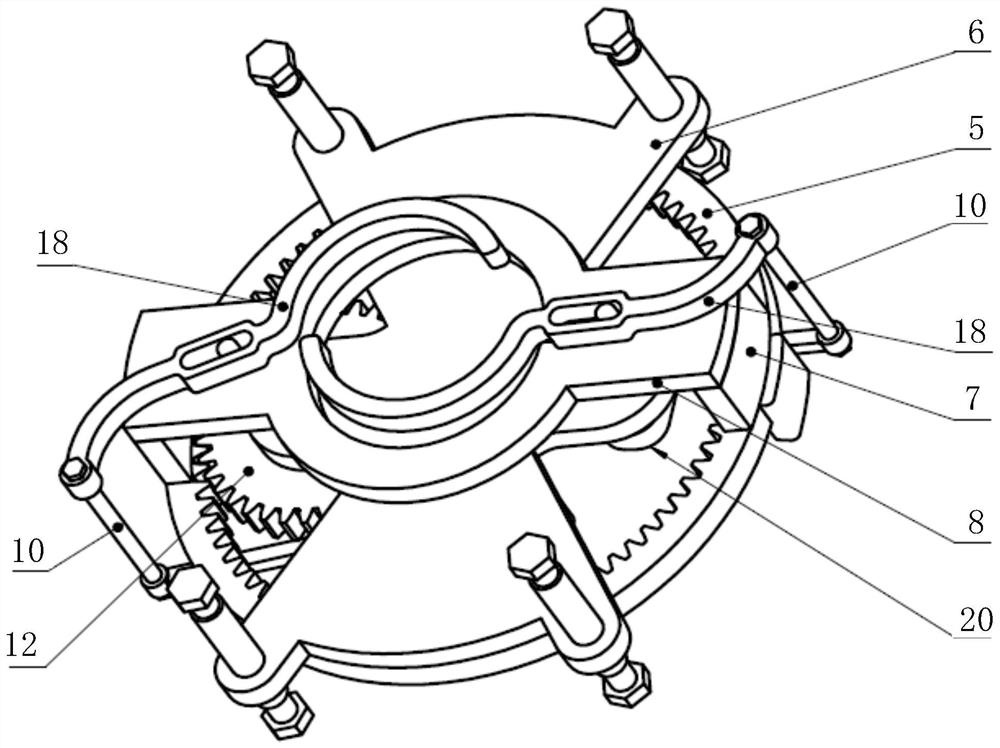
[0041] Such as Figure 1 to Figure 13The shown automatic grasping and lifting device in a reactor includes a stepping motor 1, a support frame 2, a shaft coupling 14 and lifting lugs 19. The stepping motor 1 is installed on the support frame 2, and the coupling 14 Installed on the stepper motor 1 shaft, it also includes a fixed mount 3, an upper fixed plate 4, a middle fixed plate 6, a lower fixed plate 9, a driving frame 16 and a rotating frame 21, and the upper fixed plate 4, the middle fixed plate 6 and the lower fixed plate 9 are stacked and connected in turn by bolts and nuts, and two spaces are formed between the fixed plates through sleeve support, the fixed frame 3 is welded on the upper fixed plate 4, and the drive frame 16 is coaxially installed on the fixed frame 3, it can rotate at a certain angle in the fixed frame 3, the rotating frame is installed on the groove on the drive frame 16, the support frame 2 is installed on the fixed frame 3 through nuts; the interna...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More