

Parameterized learning decision control system suitable for lane changing and lane keeping and method
A technology of lane keeping and control system, applied in general control system, control/regulation system, adaptive control, etc., can solve the problem that it is difficult to achieve continuous learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
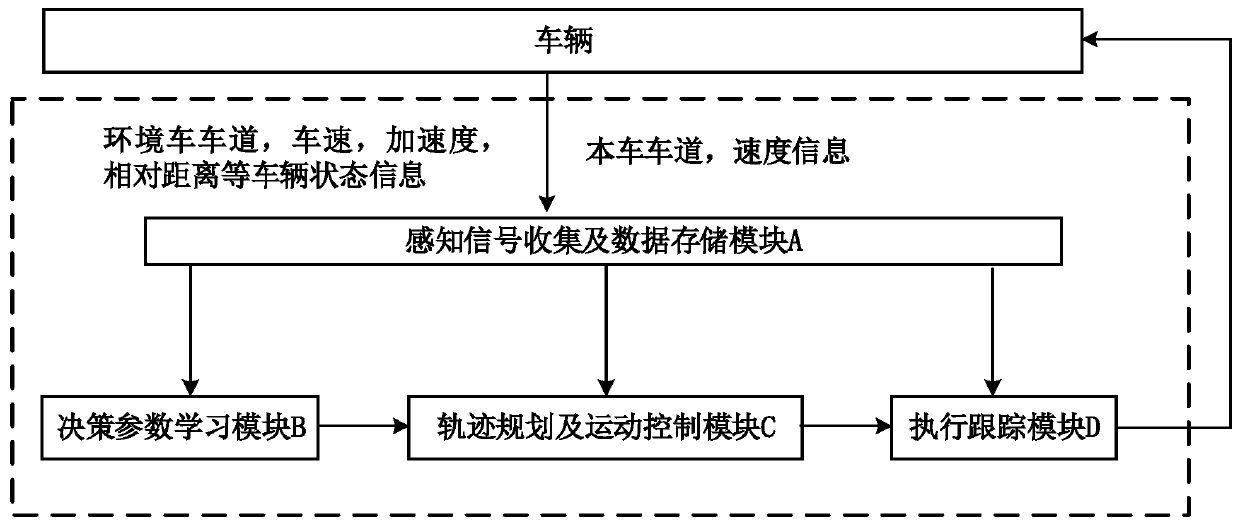
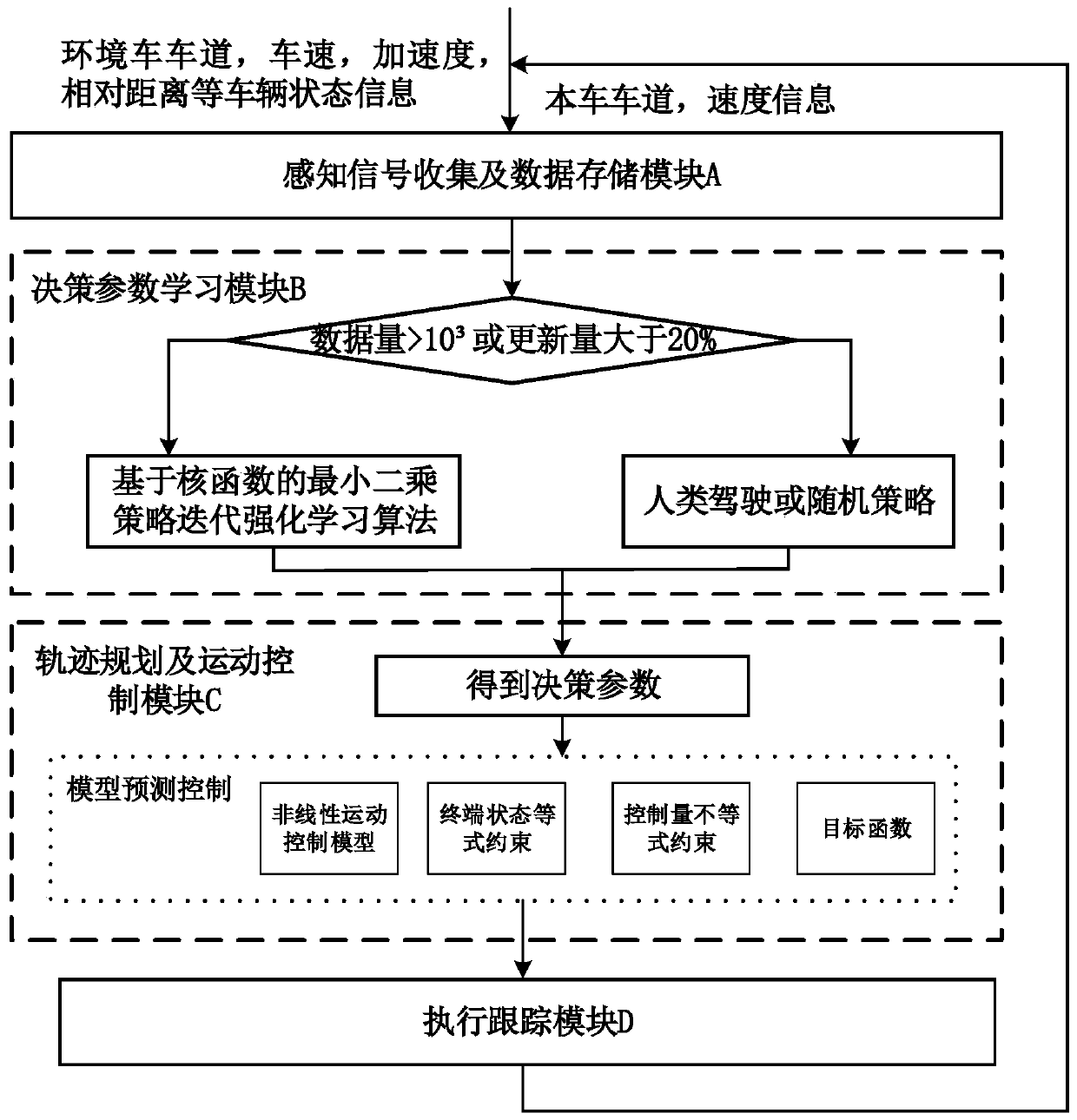
[0097] Since the driving behavior characteristics of the driver in the real driving environment are unknown at the system design stage, it is difficult to establish an accurate model, and the system needs to improve the overall performance of the system through continuous learning. In order to improve the adaptability of the system to the characteristics of different driving behaviors of different drivers, so as to ensure the safety of the system while obtaining better driving performance, the present invention designs parameters suitable for lane changing and lane keeping behaviors based on a parameterized decision-making framework. A chemical learning control system, which includes a learning decision method designed based on a reinforcement learning algorithm for vehicles in lane changing and lane keeping scenarios, and a corresponding parameterized trajectory planning controller that can be adapted to straight and curved roads in such scenarios.
[0098] A parametric learni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More