

Transportation device based on robot vision system and independent tracking system
A technology of robot vision and autonomous tracking, applied in the field of trolleys, can solve problems such as leaving at the airport, stealing luggage, unsafe luggage handling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
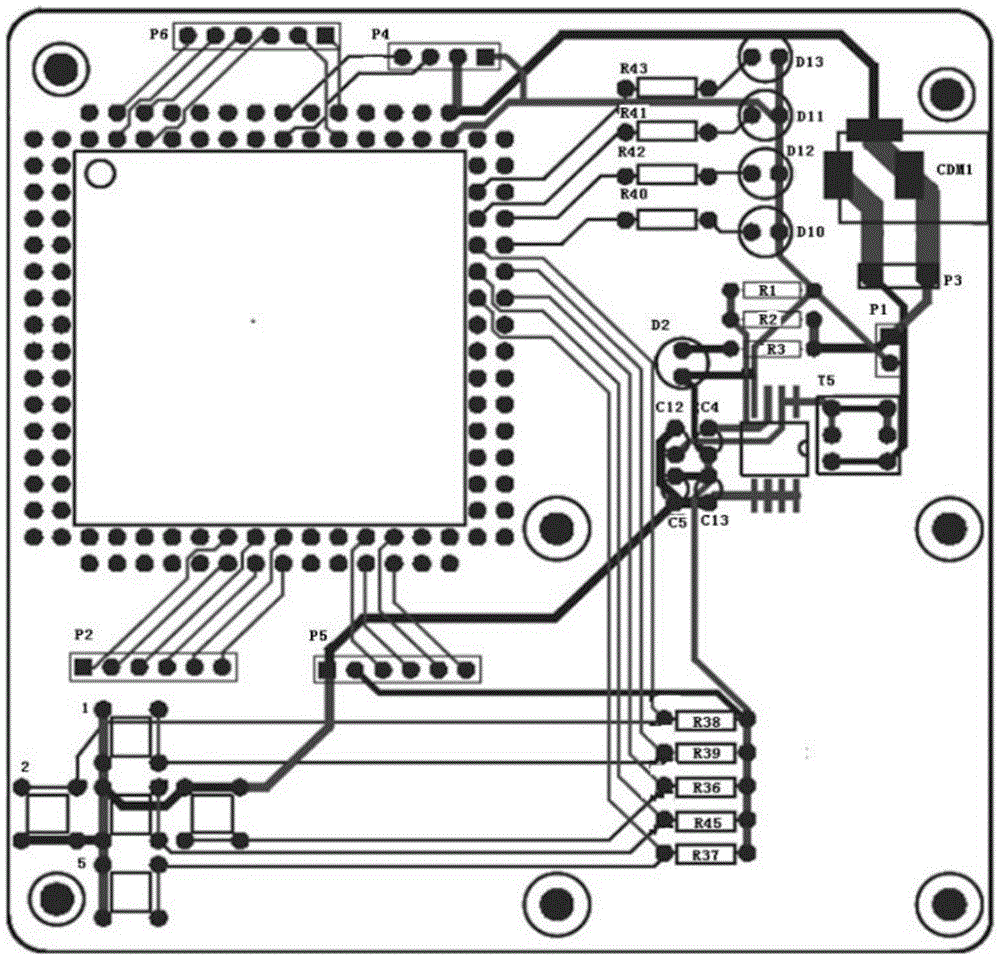
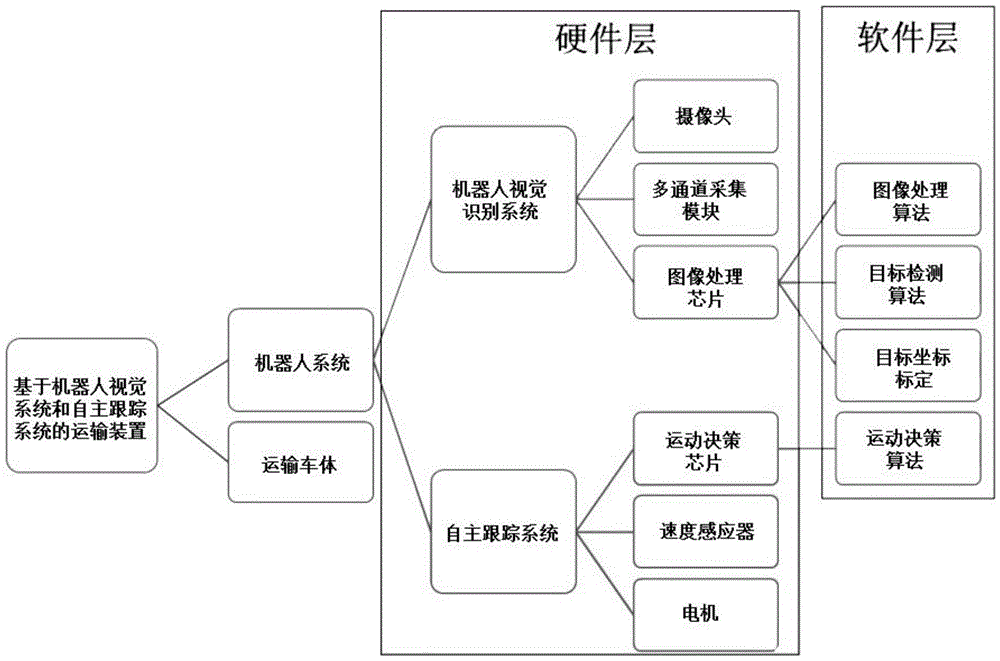
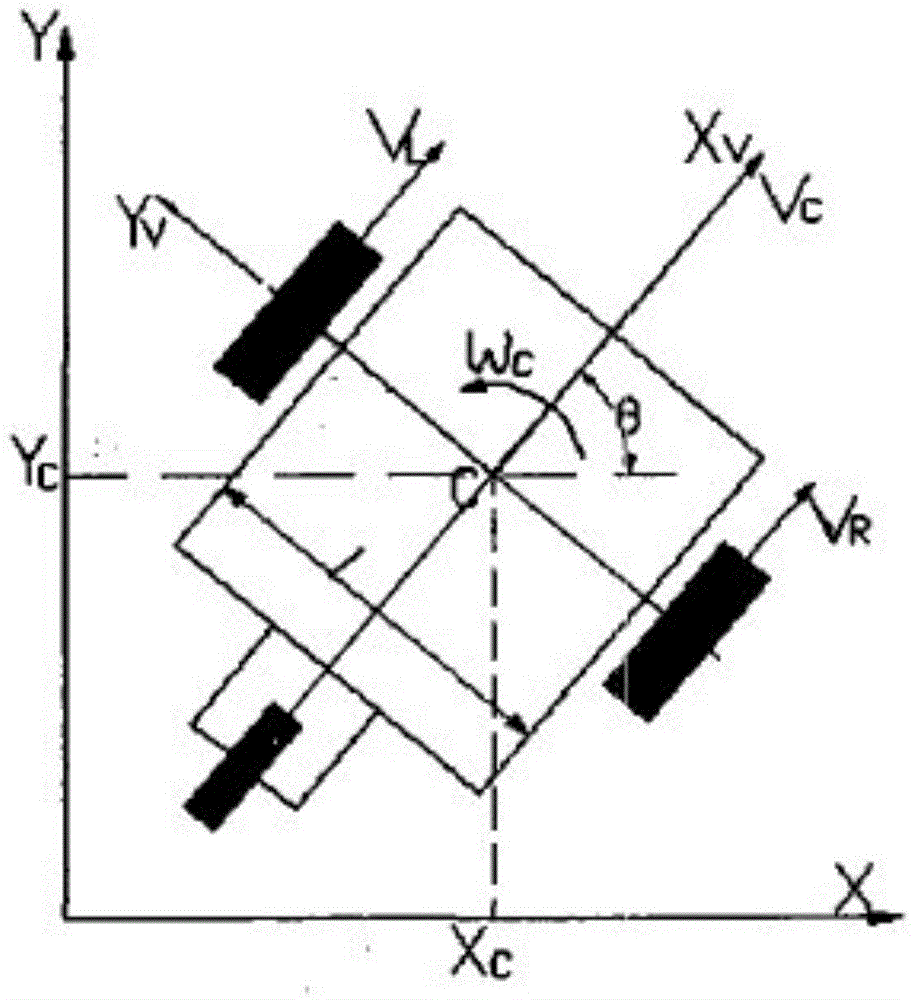
[0042] Such as figure 1 Shown is the frame schematic diagram of the transportation device based on robot vision system and autonomous tracking system of the present invention; figure 2 Shown is the motion schematic diagram of the autonomous tracking system in the transportation device based on the robot vision system and the autonomous tracking system of the present invention; image 3 Shown is the structural representation of the transportation device based on the robot vision system and the autonomous tracking system of the present invention; a transportation device based on the robot vision system and the autonomous tracking system of the present invention includes a transportation vehicle body 1, and the transportation vehicle body 1 is provided with There is a control system 2 and an initial target information storage system, a visua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More