

Method, system, device, and computer-readable storage medium for controlling vibration of unmanned aerial vehicle rudder surface
A technology of aircraft rudder surface and rudder surface, which is applied in the direction of control/regulation system, aircraft control, non-electric variable control, etc., can solve the problem of large error, to ensure flight performance, non-overshoot jitter suppression, ensure control performance and The effect of flight performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
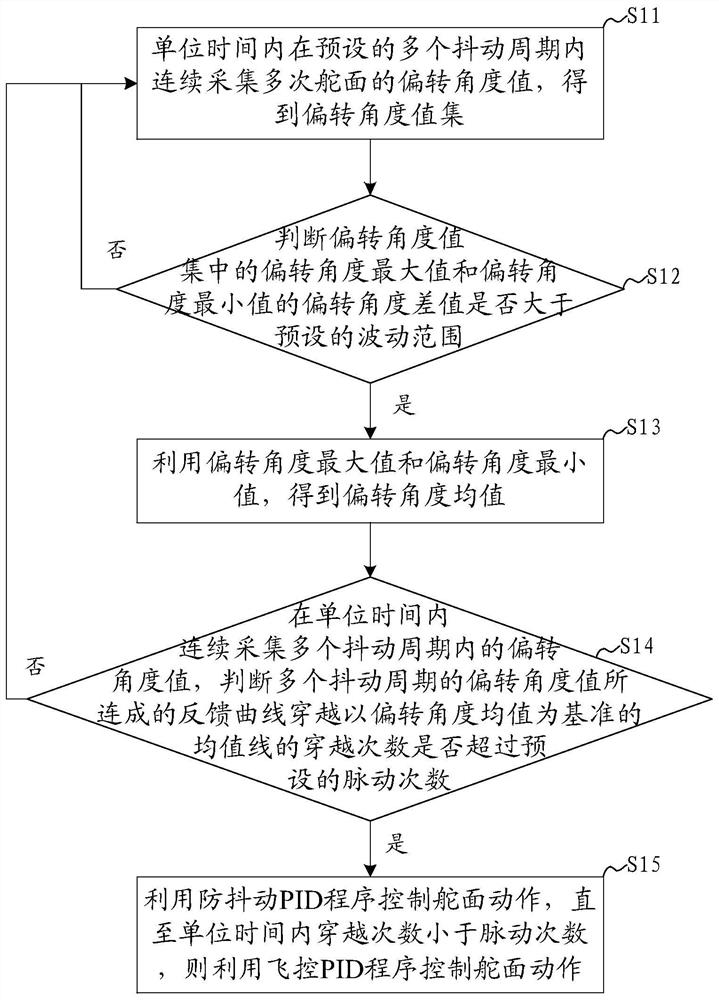
[0038] The embodiment of the present invention discloses a control method for the rudder surface of an unmanned aerial vehicle, see figure 1 As shown, the method includes:
[0039] S11: Continuously collect deflection angle values of the rudder surface for multiple times within a plurality of preset jitter periods within a unit time to obtain a deflection angle value set.
[0040] Specifically, in order to capture the non-overshoot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More