

Visual tracking method for unmanned aerial vehicle and unmanned aerial vehicle having visual tracking function
A visual tracking and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve problems such as easy loss of targets, low accuracy, and insufficient stability of tracking performance, and achieve the effect of improving accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be clearly and completely described below. Apparently, the described embodiments are some, not all, embodiments of the present invention. Based on the described embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
[0026] Unless otherwise defined, the technical terms or scientific terms used in the present invention shall have the usual meanings understood by those skilled in the art to which the present invention belongs.
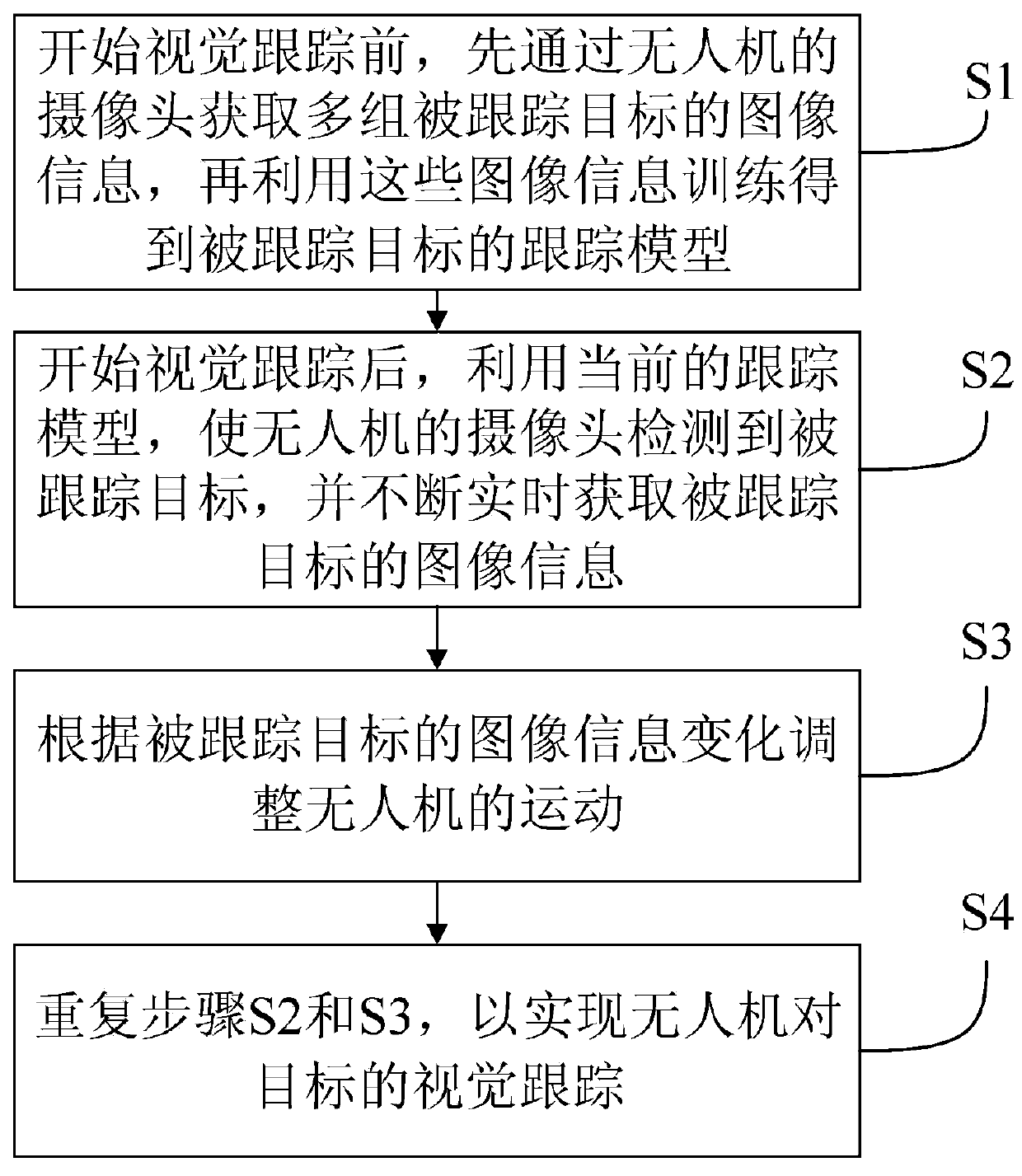
[0027] refer to figure 1 , a kind of visual tracking method of unmanned aerial vehicle provided by the present invention, the nose of this unmanned aerial vehicle is provided with camera, and this method comprises the following steps: S1, before starting v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More