

Simplified generalized Voronoi diagram-based robot autonomous exploration method
A robot, a generalized technology, applied in the field of automation, can solve problems such as waste of computing time, collision of mobile robots, lack of environmental information, etc., and achieve the effect of reducing the amount of computing and reducing the number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
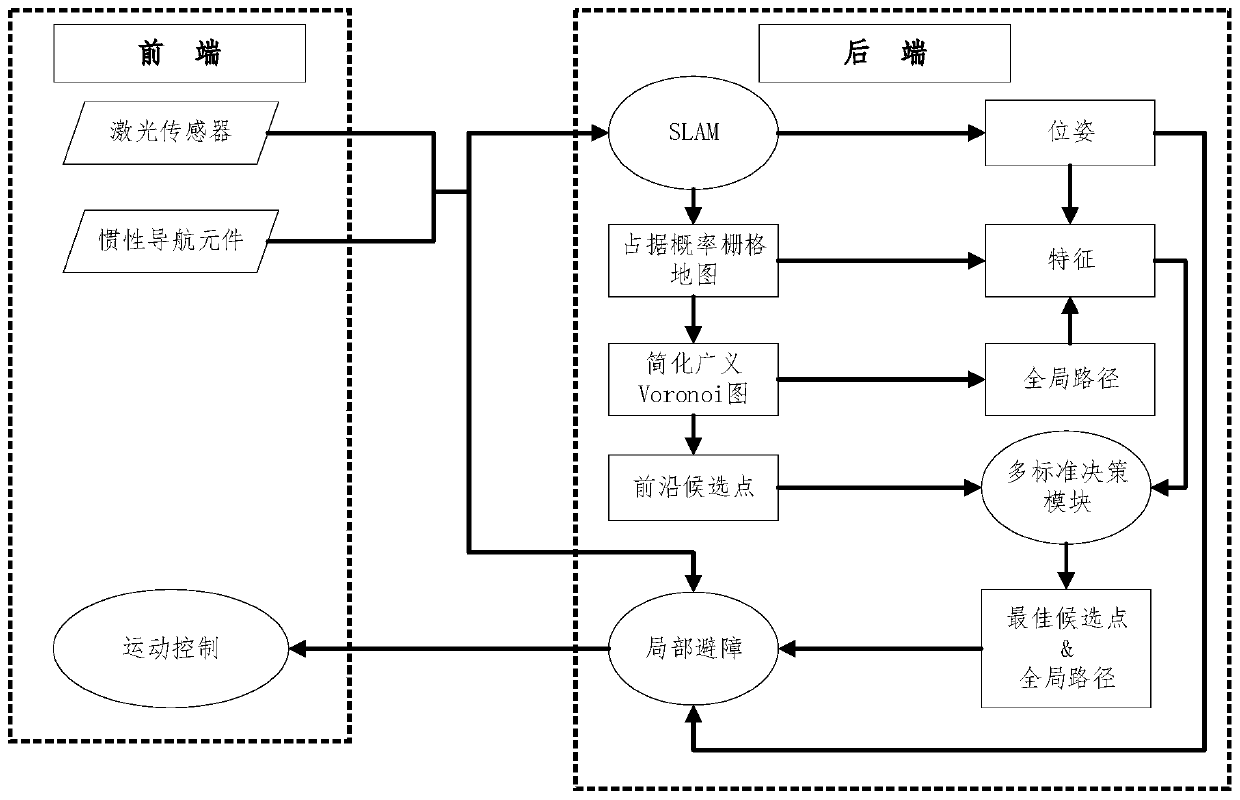
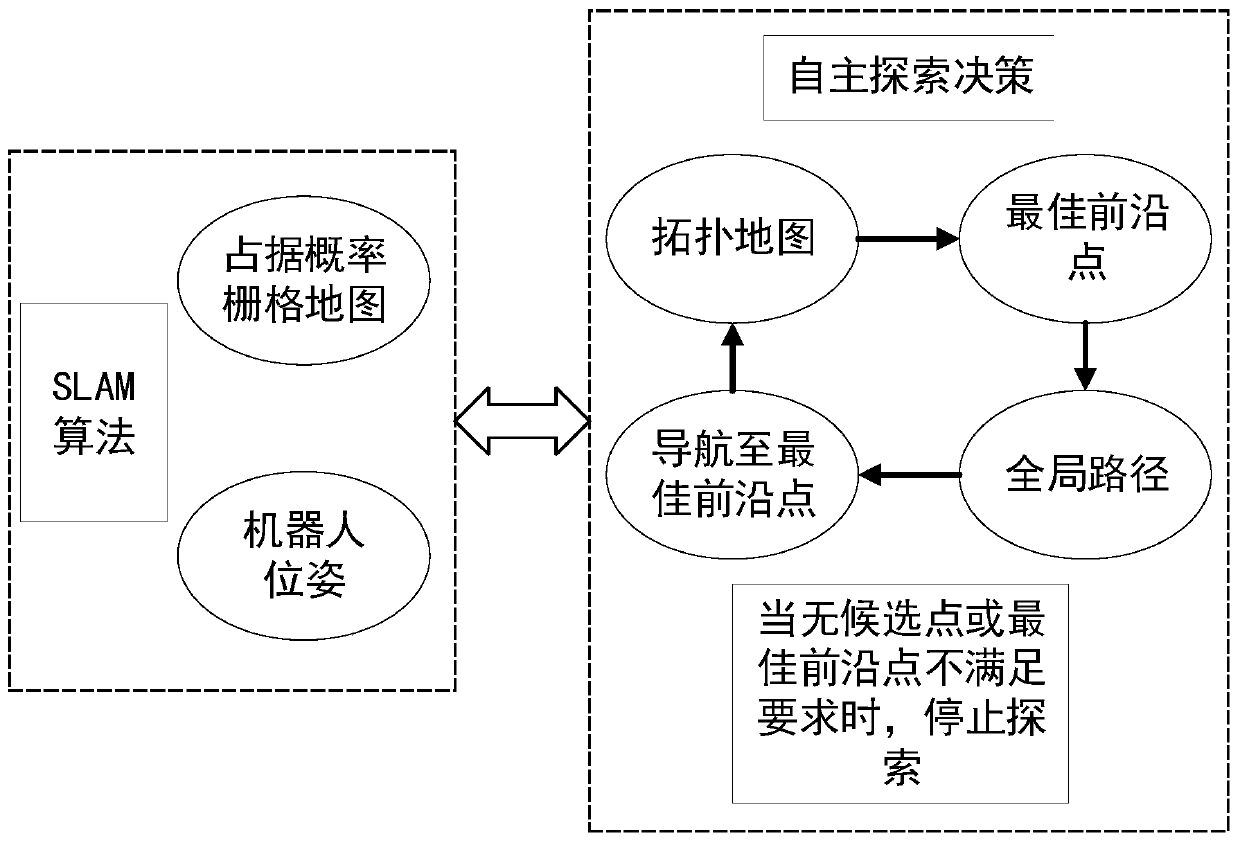
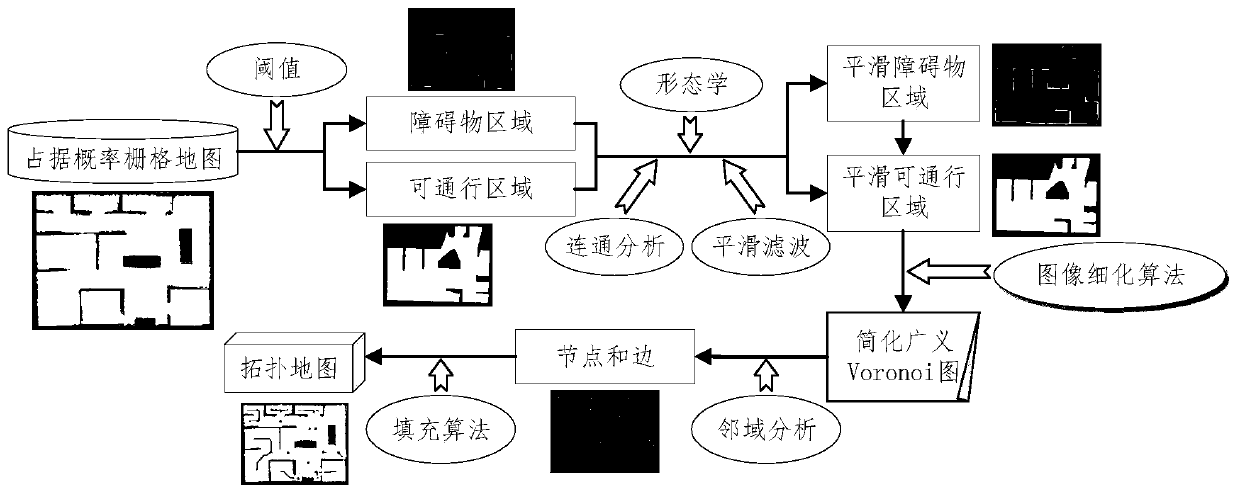
[0054] This embodiment provides an autonomous exploration method for a mobile robot applicable to indoor scenes. A topological map is generated from an occupancy probability grid map, and the indoor autonomous exploration method for a mobile robot is designed and implemented by combining the respective advantages of the two environmental maps. This embodiment is realized through the following technical solutions, constructing a simplified generalized Voronoi topological map based on the morphological method, finding the best frontier point, and planning the global path from the current position of the robot to the best frontier point, along the global path R={r 0 , r 1 , r 2 ,...,p NBV} to navigate the robot to the best frontier point. Such as figure 1 shown. This method makes full use of the characteristics of the simplified generalized Voronoi ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More