

Method and device for controlling vehicle movement
A vehicle and sports technology, applied in the field of smart cars, can solve problems such as poor applicability, and achieve the effect of improving applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
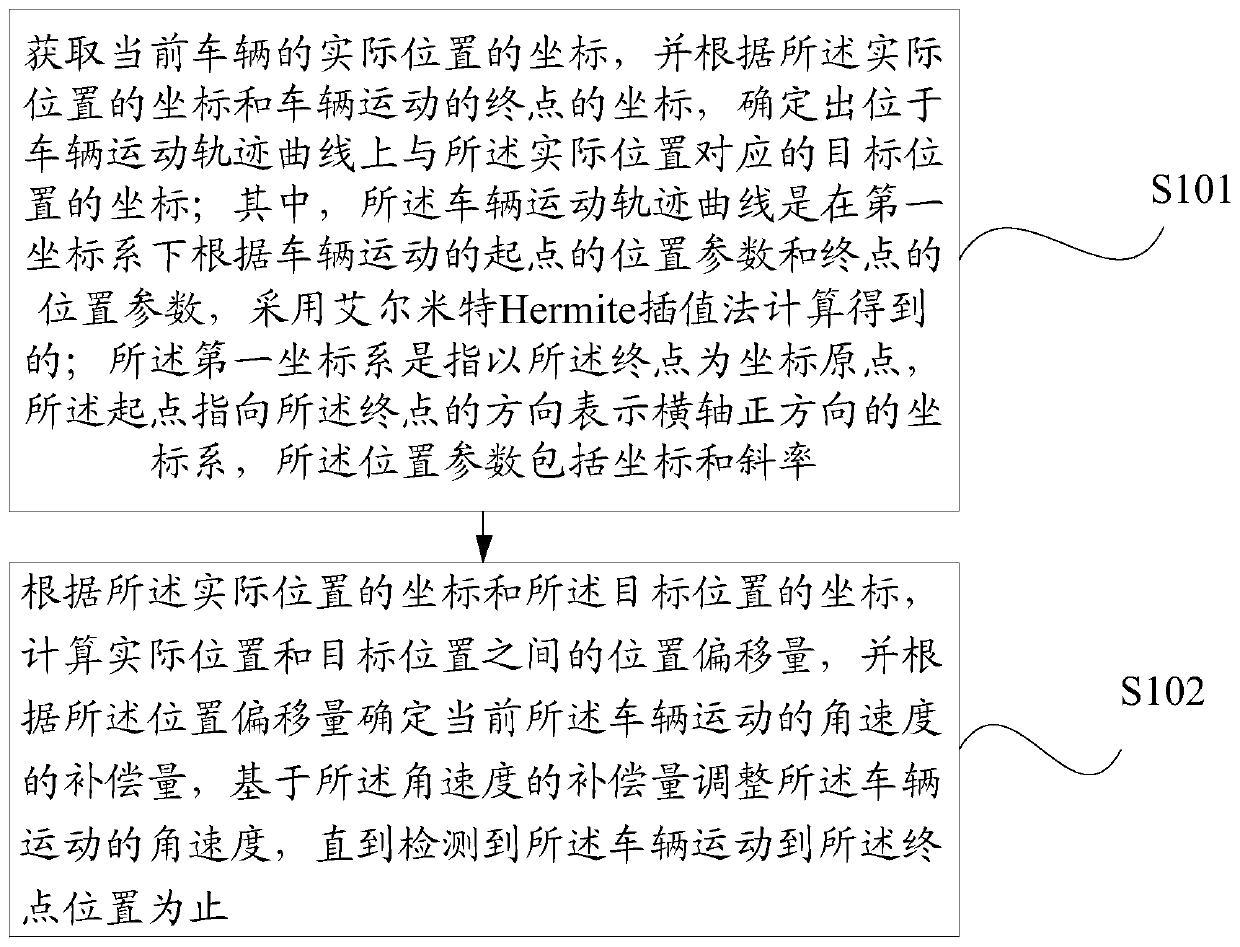
[0080] A method for controlling the movement of a vehicle provided by the embodiment of the present application will be described in further detail below in conjunction with the accompanying drawings. The specific implementation of the method may include the following steps (the method flow is as follows: figure 1 shown):
[0081] Step 101, obtain the coordinates of the actual position of the current vehicle, and determine the coordinates of the target position corresponding to the actual position on the vehicle motion trajectory curve according to the coordinates of the actual position and the coordinates of the end point of the vehicle motion; wherein, The vehicle motion track curve is calculated by using the Hermite interpolation method according to the position parameters of the starting point and the end point of the vehicle motion in the first coordinate system; the first coordinate system refers to the The end point is the coordinate origin, the direction from the start...
Embodiment 2
[0159] An embodiment of the present application provides a device for controlling vehicle movement, see image 3 , the device consists of:
[0160] The determining unit 301 is configured to obtain the coordinates of the actual position of the current vehicle, and determine the coordinates of a target position corresponding to the actual position on the vehicle motion trajectory curve according to the coordinates of the actual position and the coordinates of the end point of the vehicle movement ; Wherein, the vehicle motion locus curve is calculated under the first coordinate system according to the position parameter of the starting point of the vehicle motion and the position parameter of the end point, using the Hermite interpolation method; the first coordinate system refers to Taking the end point as the origin of coordinates, the direction of the starting point pointing to the end point represents a coordinate system in the positive direction of the horizontal axis, and ...
Embodiment 3
[0191] The application provides a computing device, see Figure 5 , the computing device, comprising:
[0192] Memory 501, configured to store instructions executed by at least one processor;
[0193] The processor 502 is configured to execute instructions stored in the memory to execute the method described in Embodiment 1.
[0194] In a fourth aspect, the present application provides a computer-readable storage medium, the computer-readable storage medium stores computer instructions, and when the computer instructions are run on a computer, the computer executes the method described in Embodiment 1.
[0195] Those skilled in the art should understand that the embodiments of the present application may be provided as methods, systems, or computer program products. Accordingly, the present application may take the form of an entirely hardware embodiment, an entirely software embodiment, or an embodiment combining software and hardware aspects. Furthermore, the present appl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More