

Path Planning Method Based on Triangle Inner Guided RRT Algorithm
A path planning and triangular technology, which is applied in calculation, data processing application, prediction, etc., can solve problems such as long planning time, lack of guidance information, circuitous paths, etc., and achieve the effect of improving pathfinding efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below with reference to the accompanying drawings and embodiments.
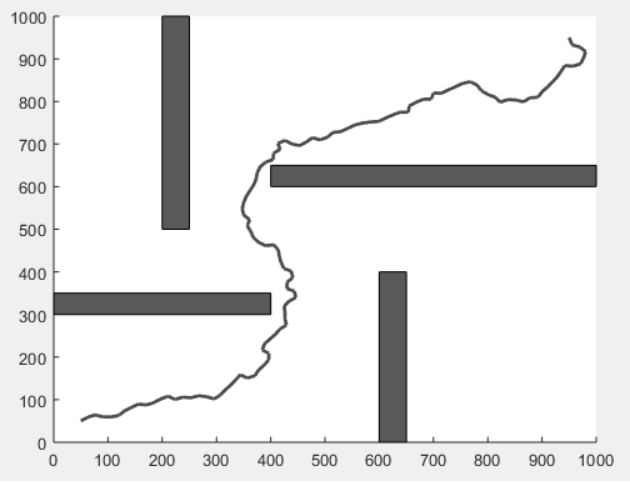
[0040] In this embodiment, preparations: the range of the planning environment is 1000X1000, the starting point of the path planning is qstart=(50, 50), and the target point is qgoal=(950, 950). The figure contains 4 rectangular obstacles, which are location such as image 3 shown.
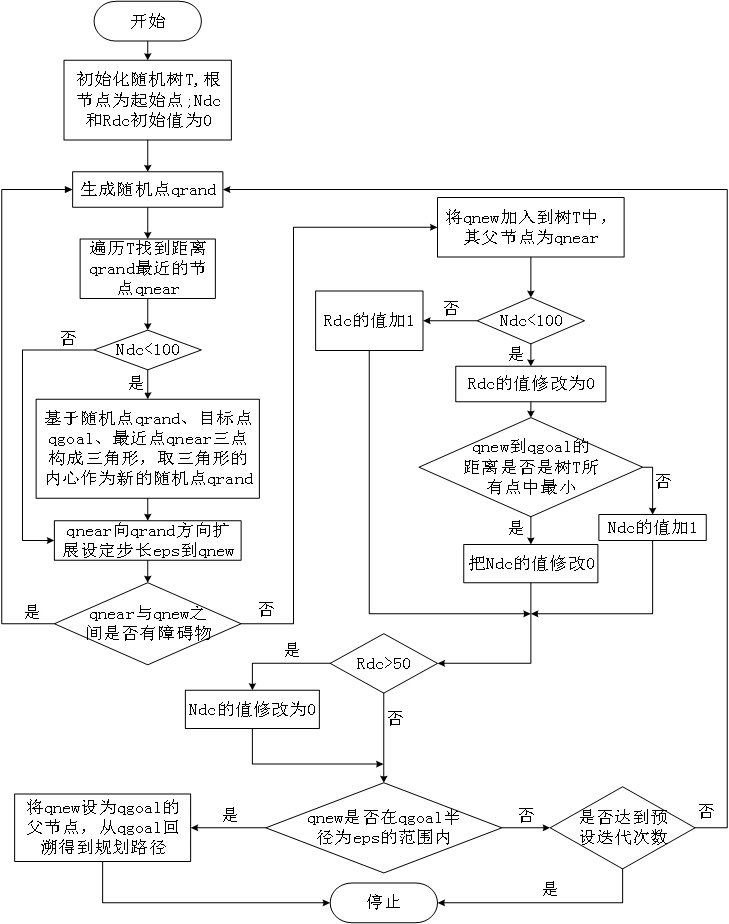
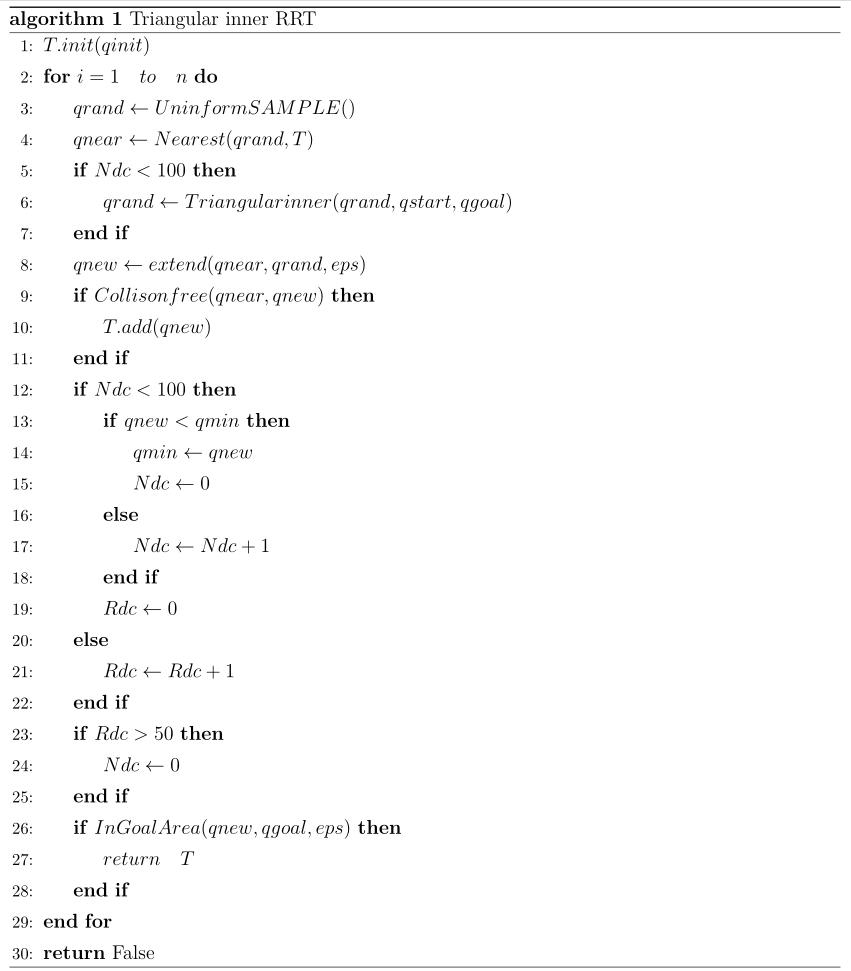
[0041] Please refer to figure 1 , the present invention provides a path planning method based on a triangle inner guide RRT algorithm, providing a starting point qstart, a target point qgoal, an obstacle position and a planning map of the planned path, including the following steps:
[0042] Step 1: Define the step size eps=15 and the maximum number of iterations 5000, take qstart as the root node of the random tree T, and use it as the parent node of the next expanded random tree, take qgoal as the target node of the random tree T, and the inner triangle of the triangle. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More