

Global dynamic smooth path planning method based on optimized A-STAR algorithm
A path planning and dynamic smoothing technology, which is applied to road network navigators, measuring devices, instruments, etc., can solve problems such as smoothing processing, large memory usage, and large computational load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application.
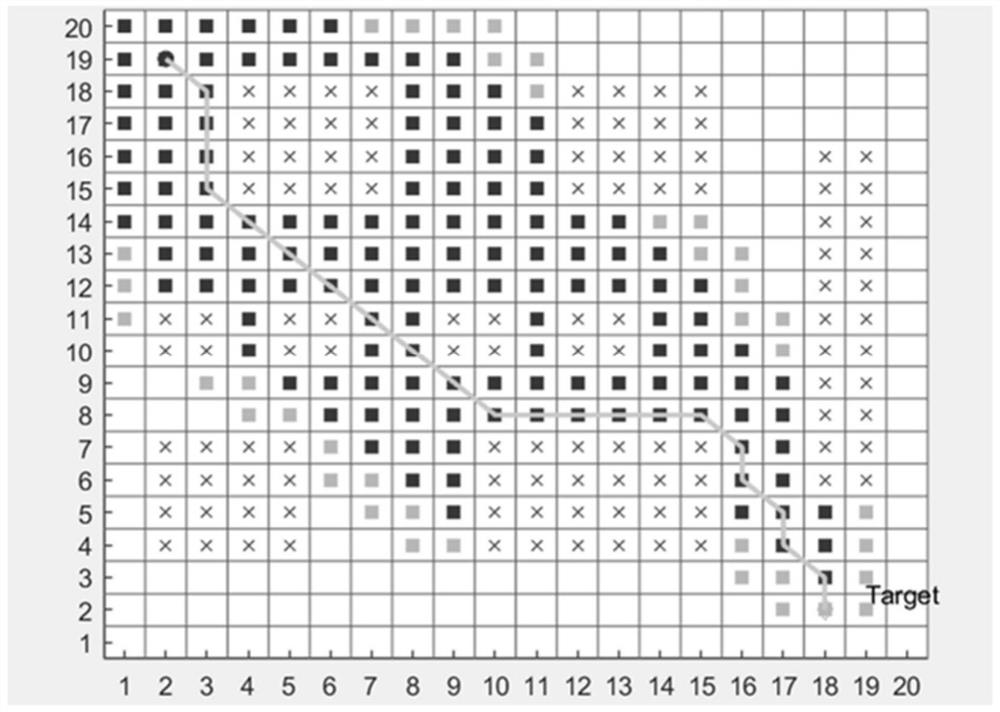
[0077] Path planning is one of the key technologies in the field of autonomous mobile robots, and a lot of research work has been carried out on this technology. The path planning of autonomous mobile robots can be divided into static path planning and dynamic path planning. Among them, the A* algorithm and the Dijkstra algorithm are mainly used in known static scenes, while the artificial potential field method, D* algorithm, and dynamic window method are mostly used in dynamic scenes with unknown environments. At the same time, with the rapid development of artificial intelligence in recent years, intelligent algorithms such as ant colony algorithm, genet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More