

Speed acquiring method based on communication encoder
An acquisition method and encoder technology, applied in the field of speed acquisition, can solve problems such as time jitter, great influence, and sudden change in speed, so as to reduce the influence of time length error and improve the speed measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
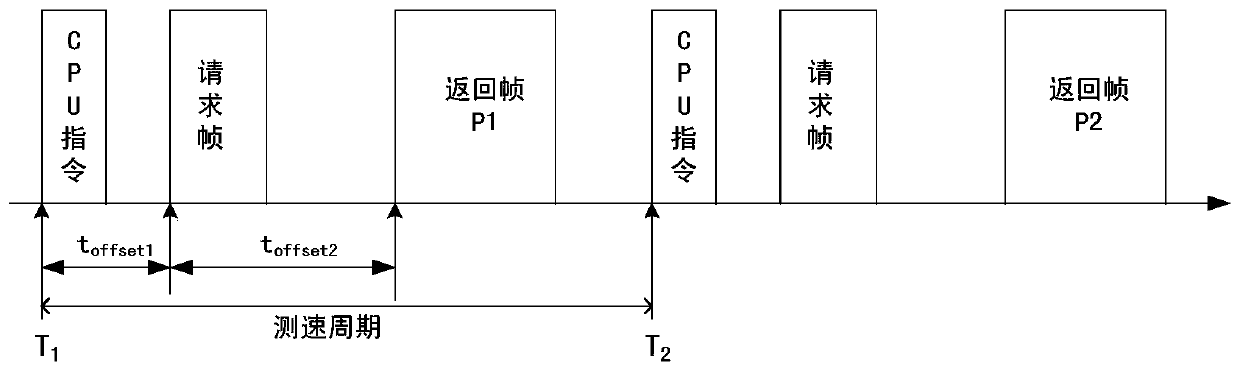
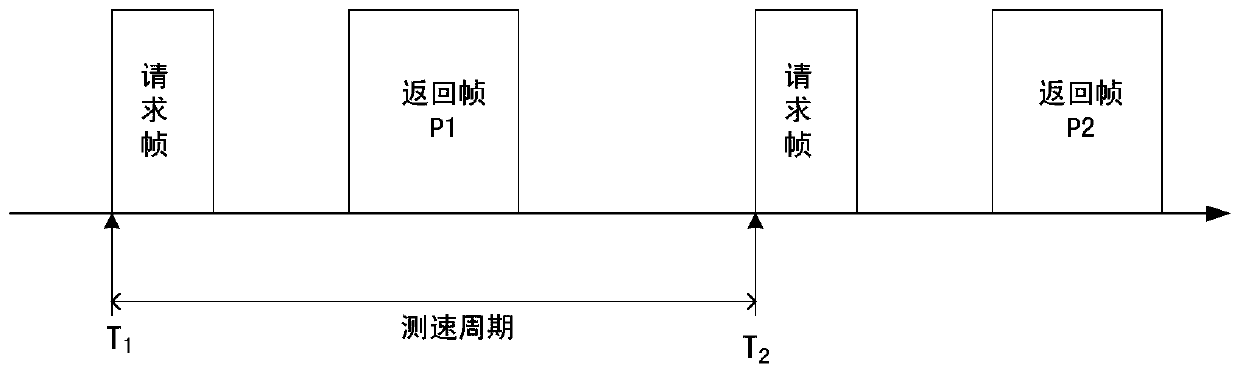
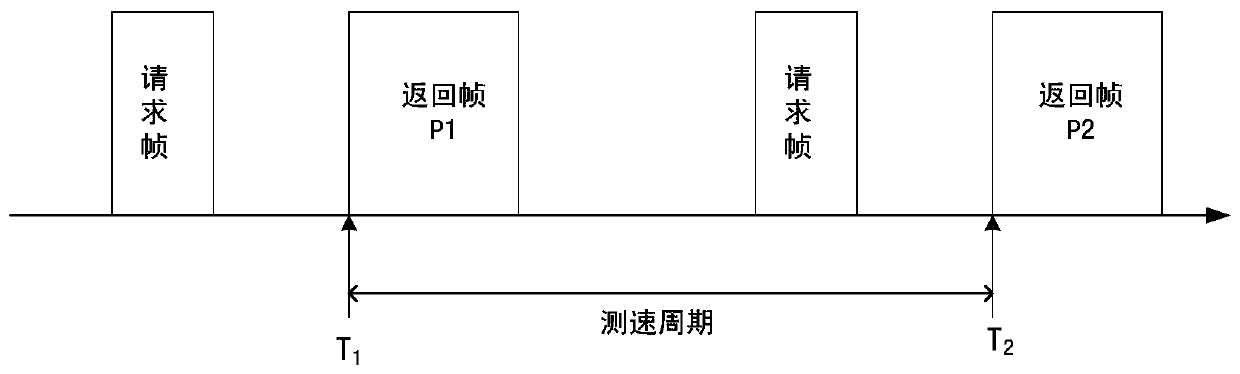
[0060] Similar to the first embodiment, in this second embodiment, step s0 to step s2 are performed by a programmable logic device, which may be an FPGA or a CPLD. The aforementioned rotating object is a motor. In step s0, the delay t is detected by the FPGA in the initialization phase offset2 The jitter range, if the delay t offset2 If the jitter range is large, the starting time of the returned frame is used as the starting time of the speed measurement cycle. If the delay time is t offset1 If the jitter range is small, the start time of the request frame is used as the start time of the speed measurement cycle.
[0061] The main difference between the second embodiment and the first embodiment is that the pulse number of the angular displacement in the speed measurement cycle is not accurate to the decimal place before calculation, and the initial moment of the speed measurement cycle is set as the pulse number sent to the communication encoder. The starting moment of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More