

Controlling of a work machine based on sensed variables
A machine and mobile operation technology, applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problems of inability to accurately estimate the volume of the contents, difficulty in measuring efficiency, and the efficiency of the soil removal process. Low and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
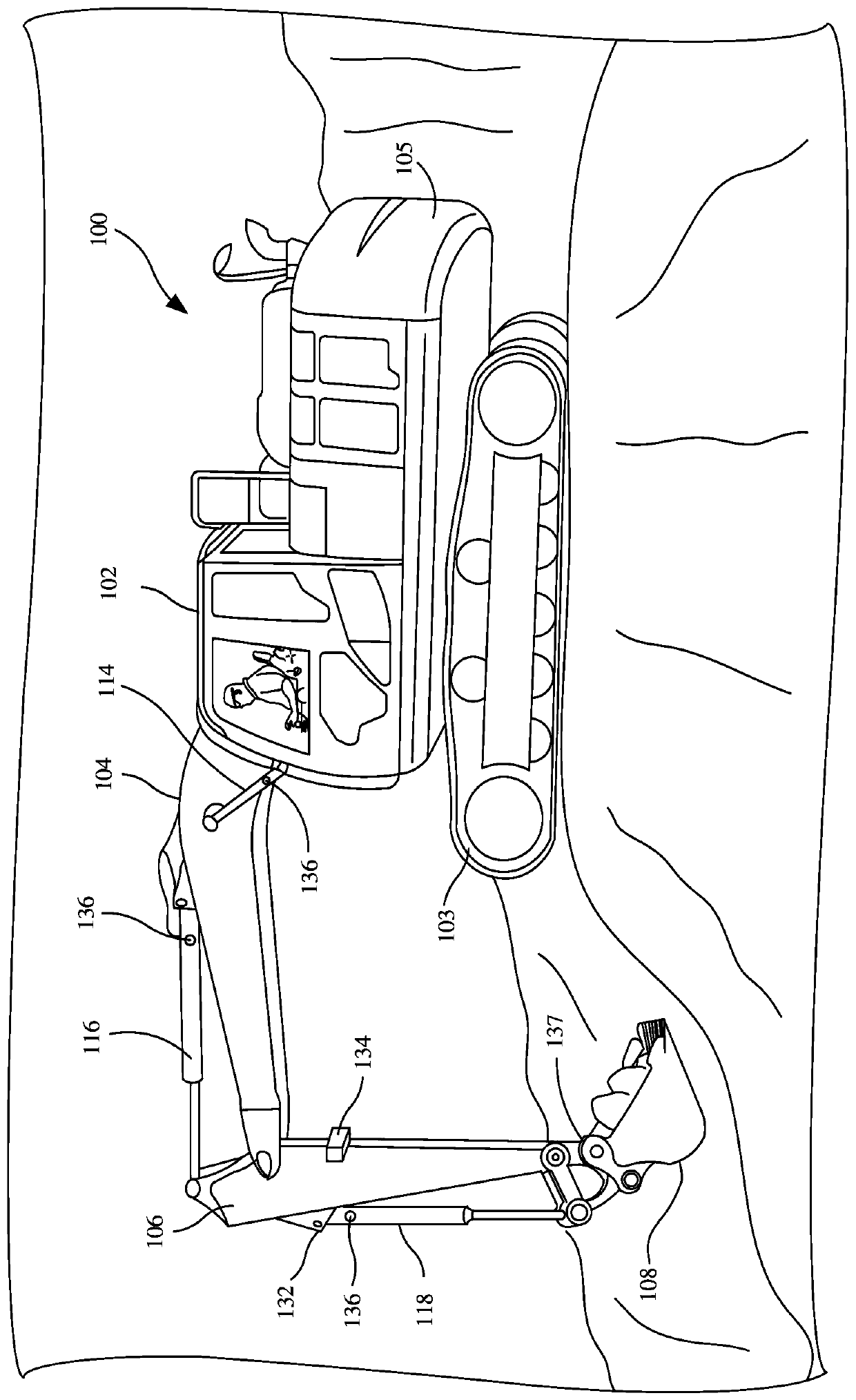
[0089] Embodiment 1 is a mobile work machine, which includes:
[0090] frame;
[0091] a ground engaging element movably supported by the frame and driven by a motor to drive movement of the mobile work machine;
[0092] a container movably supported by the frame, the container configured to receive contents;
[0093] an actuator configured to controllably drive movement of the container relative to the frame;
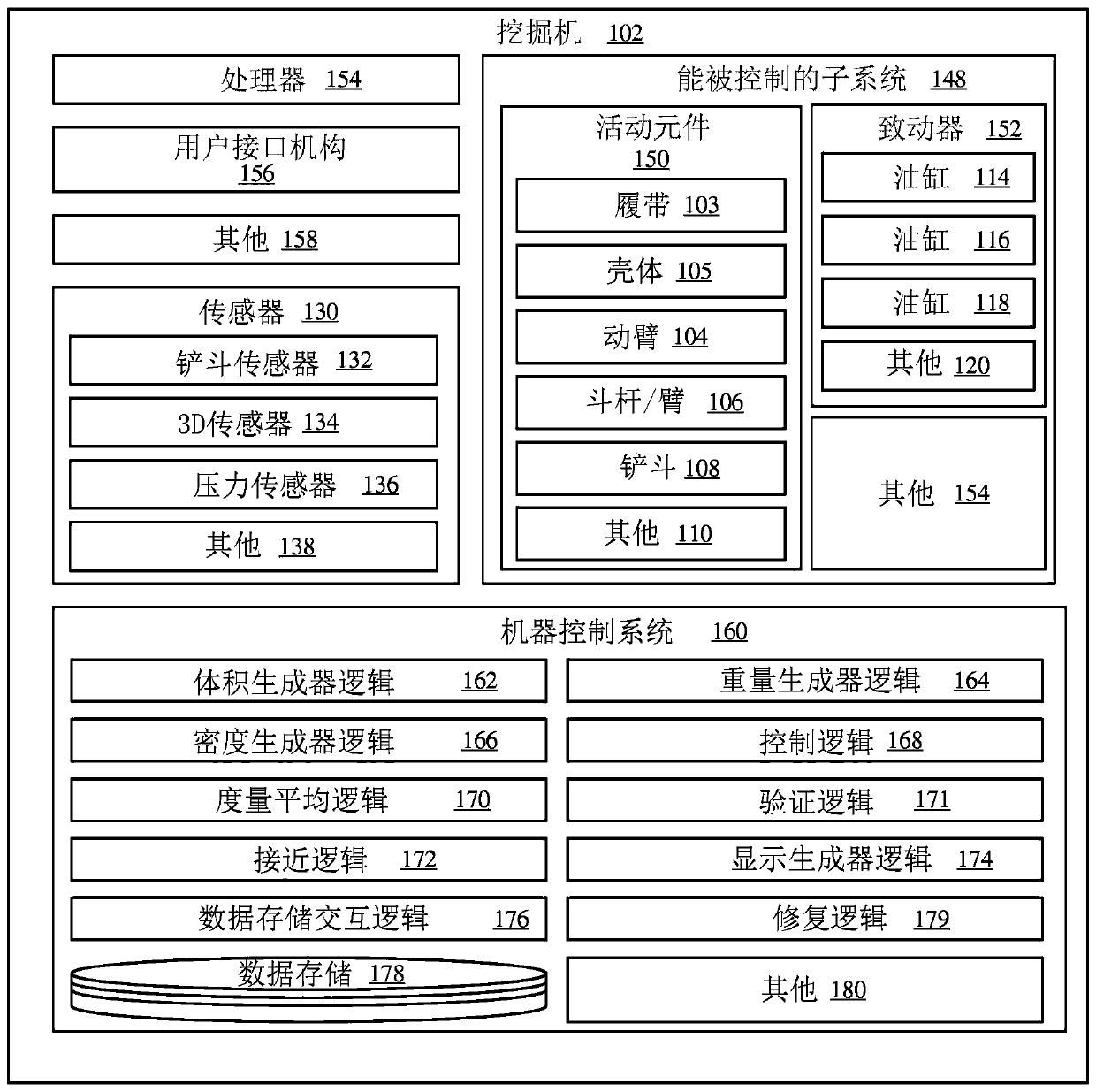
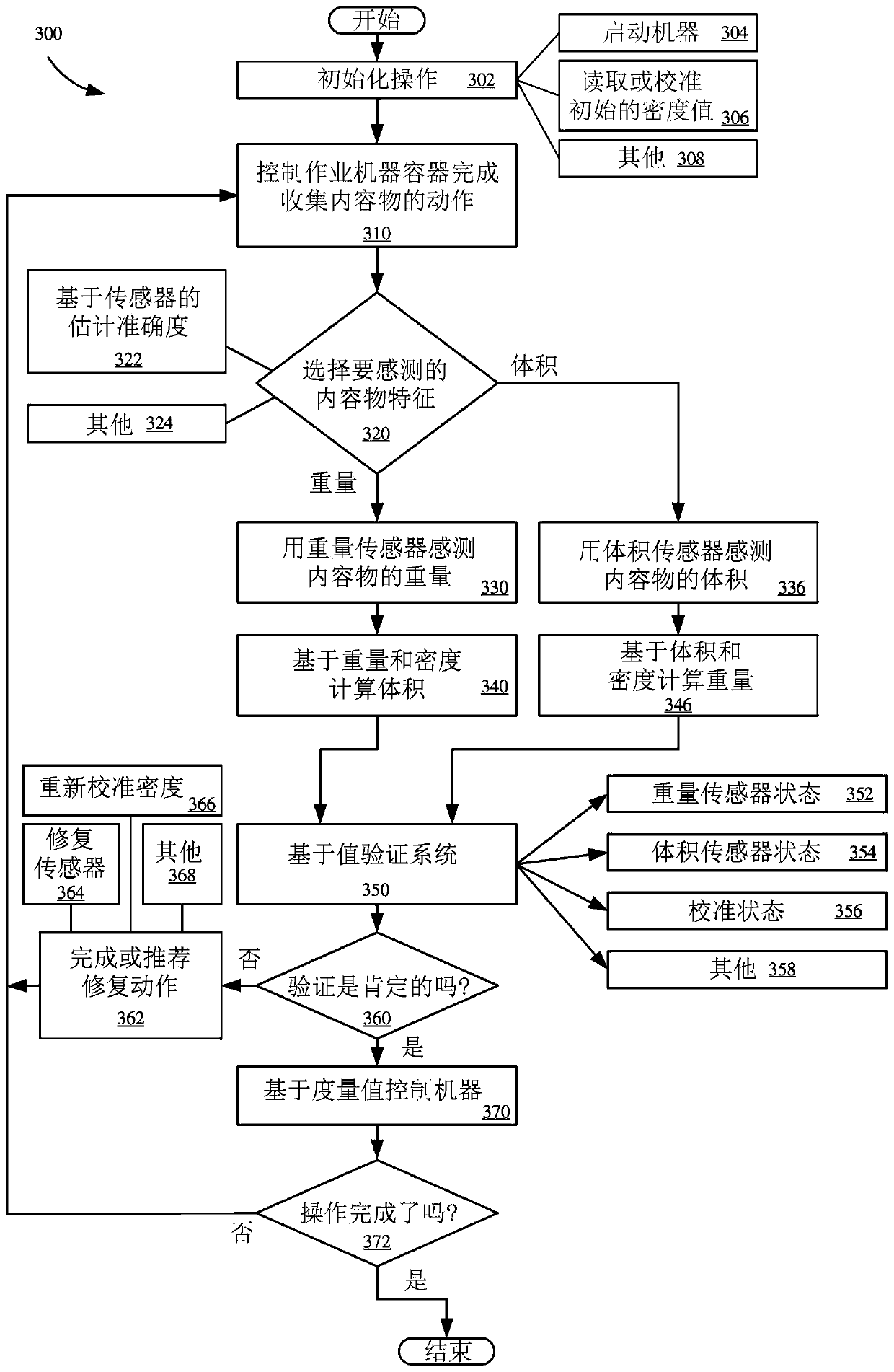
[0094] a control system configured to: generate an actuator control signal indicative of commanded movement of the actuator; and provide the actuator control signal to the actuator to control the actuator carry out said commanded movement; and
[0095] A content density determination system, communicatively coupled to the control system, is configured to determine the density of the contents of the container.
Embodiment 2
[0096] Embodiment 2 is the mobile work machine of Embodiment 1, further comprising:
[0097] a volume sensor configured to generate a volume sensor signal;
[0098] volume generator logic configured to determine the volume of the contents of the container based on the volume sensor signal; and
[0099] Wherein, the content density determination system determines the density based on the volume of the content.
Embodiment 3
[0100] Embodiment 3 is the mobile work machine of any or all of the preceding embodiments, further comprising:
[0101] a weight sensor configured to generate a weight sensor signal;
[0102] weight generator logic configured to determine the weight of the contents of the container based on the weight sensor signal; and
[0103] Wherein, the content density determination system determines the density based on the weight of the content.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More