

Autonomous driving method and system
An autonomous driving and automatic driving technology, applied in design optimization/simulation, internal combustion piston engine, mechanical equipment, etc., can solve the problems of difficult parameter calibration, ignoring the vehicle's own performance and passenger needs, and high model complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0126] This embodiment provides an autonomous driving method, including the following steps:
[0127] collecting driving data of the automatic driving vehicle, inputting the driving data into an autonomous driving model to generate operating parameters of the automatic driving vehicle, so that the automatic driving vehicle can automatically operate based on the operating parameters,
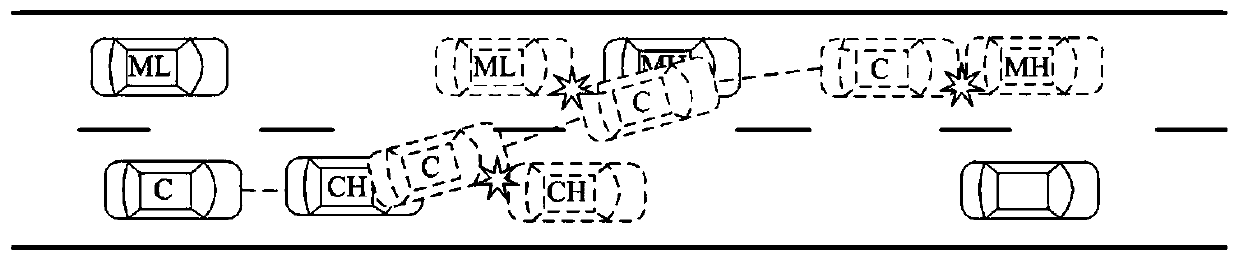
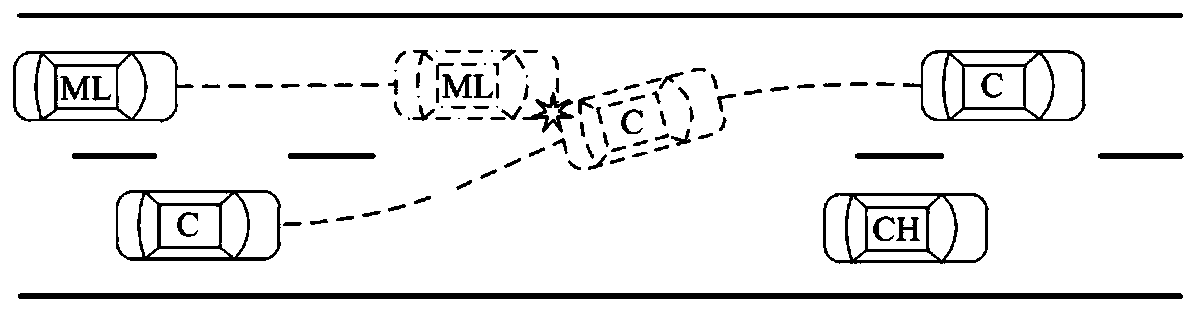
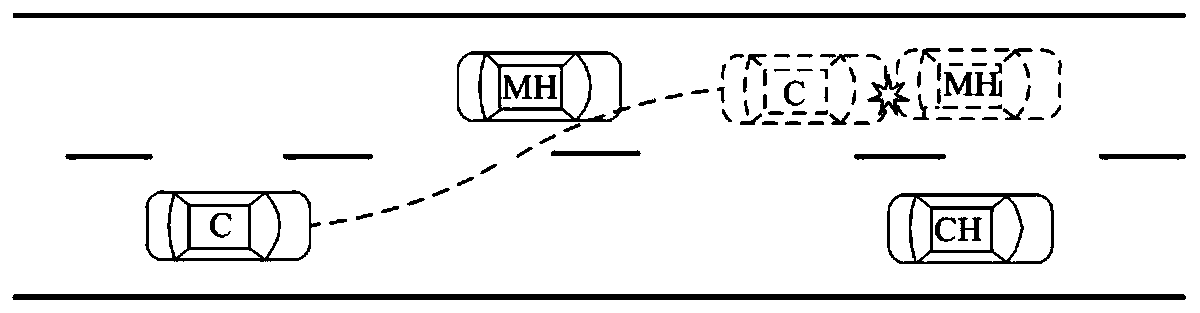
[0128] The autonomous driving model includes an autonomous driving car-following model, an autonomous driving lane-changing model,
[0129] in,
[0130] The car-following model for autonomous driving is modeled based on the different driving states of the automatic driving vehicle divided by set behavior thresholds, the set behavior thresholds include safety thresholds and comfort thresholds, and the automatic driving vehicle's Different driving states are divided into free driving state, transition driving state and car-following driving state based on the size preset relationship between the e...
Embodiment 2
[0215] The features of this embodiment that are the same as those of Embodiment 1 will not be described in detail. The features of this embodiment that are different from Embodiment 1 are:
[0216] The self-driving vehicles are specifically self-driving vehicles, and the construction of the self-driving model includes:
[0217] 1. Division of vehicle states in the autonomous driving car-following model
[0218] The division of the vehicle state takes into account the needs of the vehicle for stability, safety, and comfort during driving, and takes the headway as the threshold for its division. The determination of this value takes into account the influence of changes in the acceleration of the surrounding vehicles and itself.
[0219] In order to ensure that the self-driving vehicle does not collide with surrounding vehicles during driving, it needs to meet a certain headway distance with the vehicle in front, that is, from the information acquisition to the braking of the se...
Embodiment 3
[0393] The same features of the present embodiment and the second embodiment will not be repeated, and the different features of the present embodiment and the second embodiment are:
[0394] The autonomous driving model is adapted to the UC-winRoad driving simulator.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More