Mechanical arm and automatic carrying device
A technology of handling device and robotic arm, which is applied in the field of machinery, can solve the problems of reduced handling efficiency, small working space, wasted trajectory, etc., and achieve the effects of eliminating singular points of the wrist, large working space and increasing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The specific implementation manner of the present invention will be described in more detail below with reference to schematic diagrams. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that all the drawings are in a very simplified form and use imprecise scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
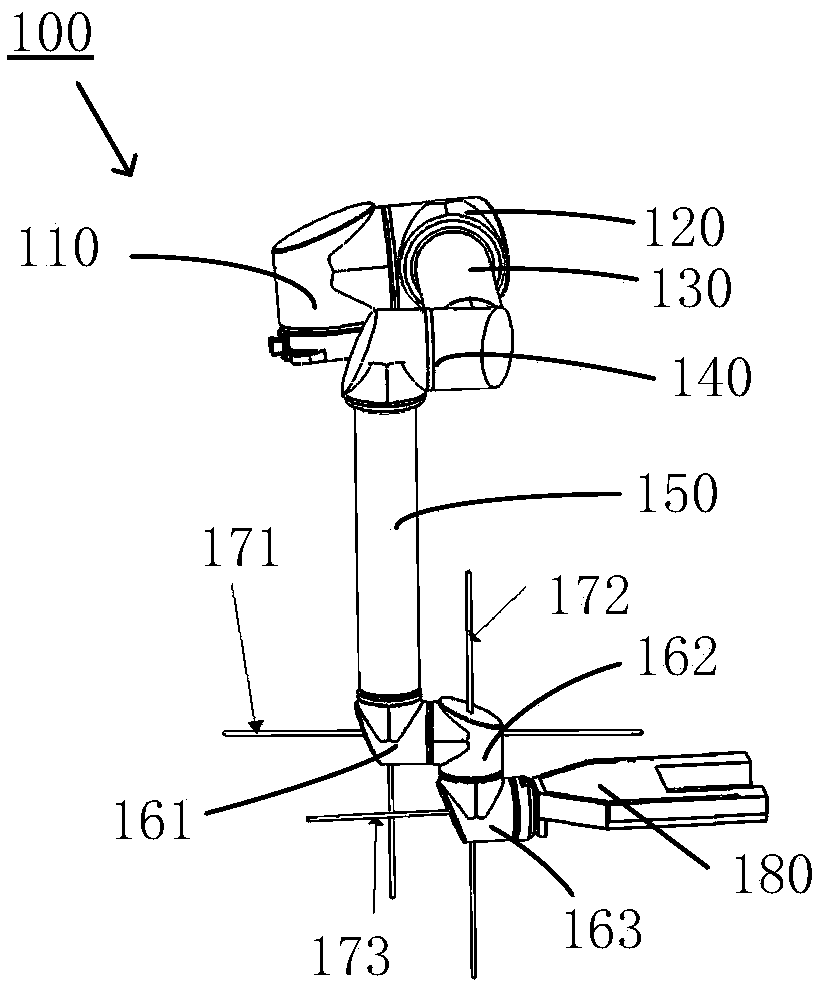
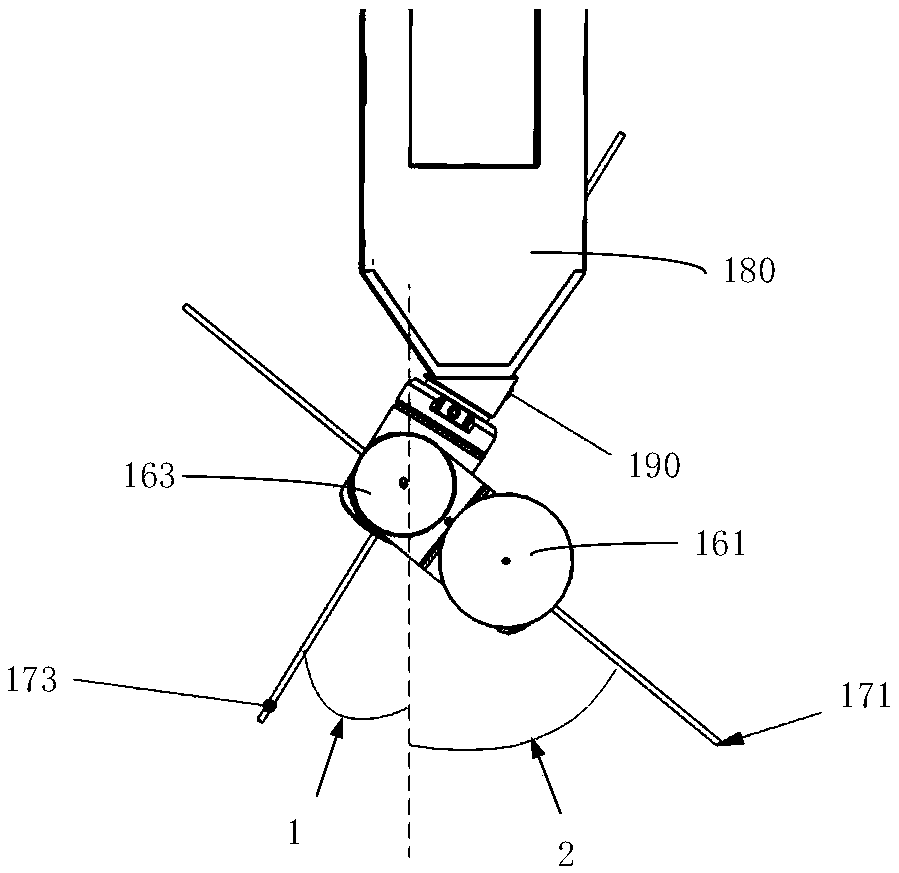
[0025] refer to Figure 1 to Figure 5 , the present invention provides a mechanical arm 100, comprising: a wrist joint 140, the wrist joint 140 is connected to a mechanical fork 180 through an adapter block 190, and the mechanical fork 180 is relative to the wrist joint 140 The axis is set at an angle.
[0026] In this embodiment, the wrist joints include a first wrist joint 161, a second wrist joint 162 and a third wrist joint 163; the mechanical fork 180 is connected to the third wrist joint through the adapt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com