Intelligent vehicle crosswind resistance control method based on fuzzy adaptive PID control
A fuzzy self-adaptive, intelligent vehicle technology, applied in the field of intelligent control, can solve problems such as increasing the driver's manipulation burden, potential safety hazards, changing tire cornering characteristics, etc., and achieve the effect of improving steering stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
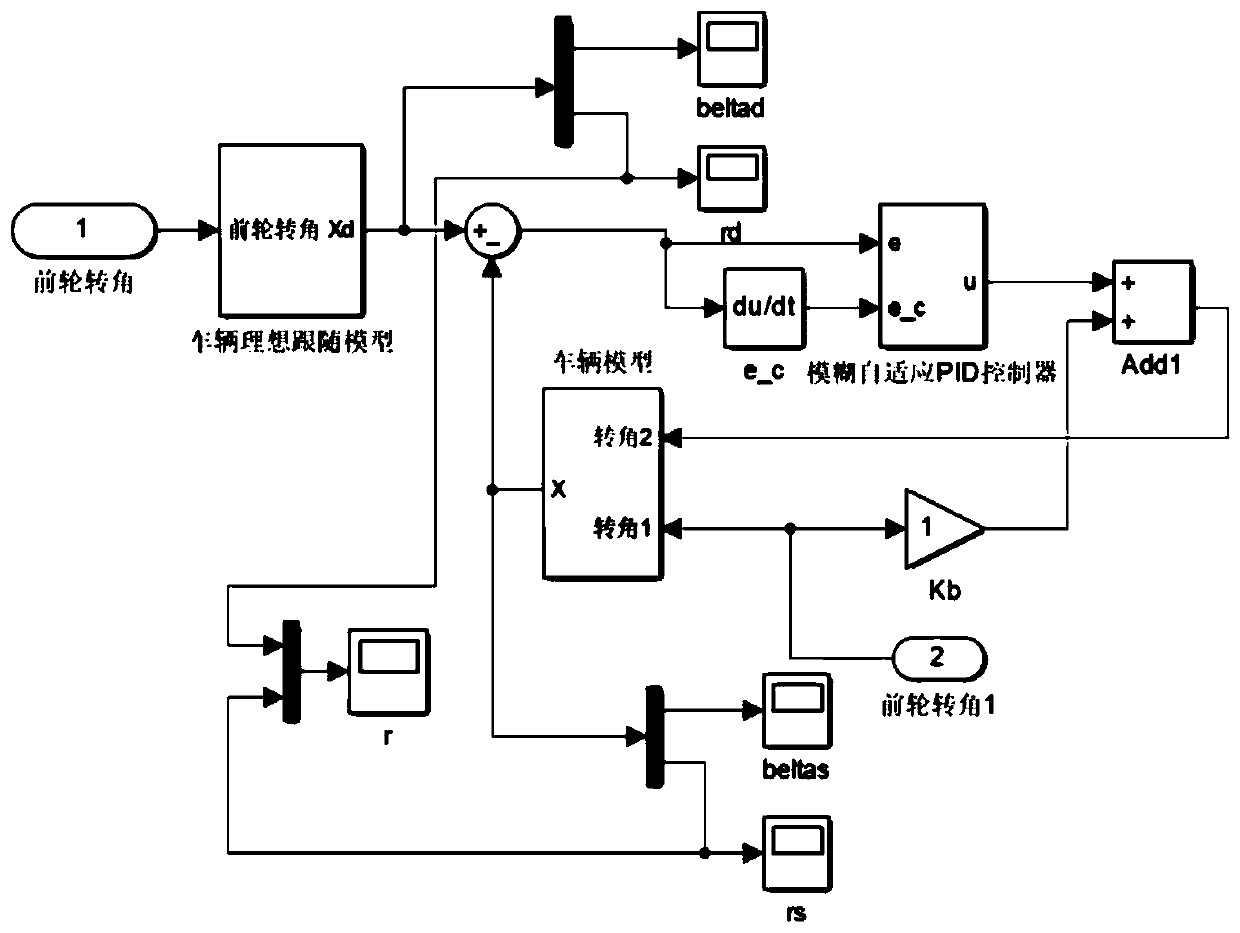
[0059] In the following, the active four-wheel steering intelligent vehicle is taken as the main research object, with improving the handling stability of the intelligent vehicle under high-speed driving conditions and the robustness under crosswind interference as the main control objectives, the fuzzy adaptive PID control is used to carry out four-wheel steering The design of the wheel steering system controller eliminates the adverse effects on the driving vehicle under crosswind interference.
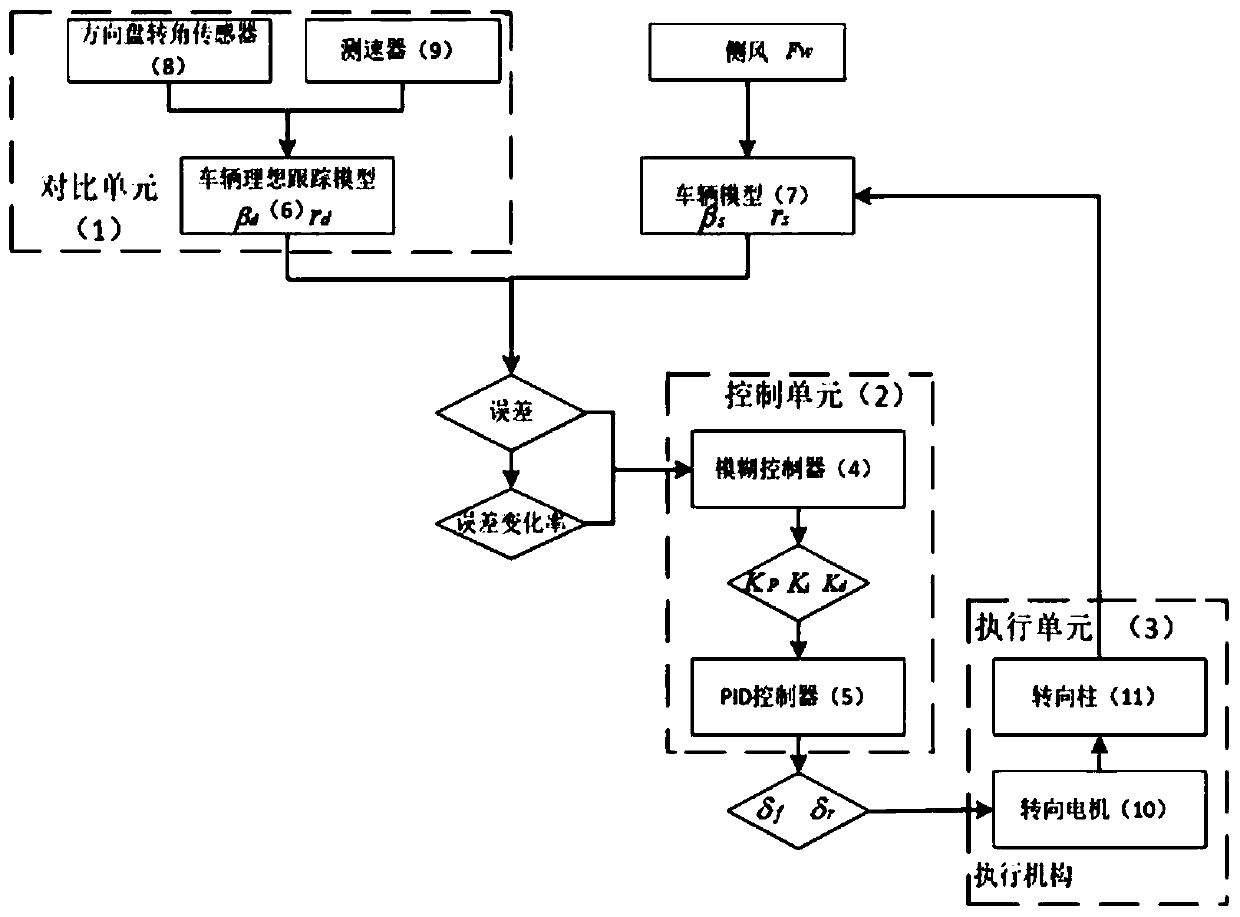
[0060] 1. Comparison unit
[0061] 1.1 Vehicle ideal following model
[0062] Establish the ideal following model of the vehicle, use the linear two-degree-of-freedom front-wheel steering vehicle model as the ideal following model, and calculate the ideal center of mass sideslip angle and yaw rate of the vehicle;
[0063] 1.1.1 Vehicle ideal center of mass side slip angle model
[0064] beta ideal =G βd □δf * (1)
[0065] Add the first-order inertial link and correct the side...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap