

Three-dimensional point cloud processing method, device and equipment
A three-dimensional point cloud and processing method technology, applied in image data processing, 3D image processing, instruments, etc., can solve the problems of easy loss of spatial local detail geometric information, large memory footprint, and multiple computer resources, etc., to alleviate data loss. and the effect of redundancy problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
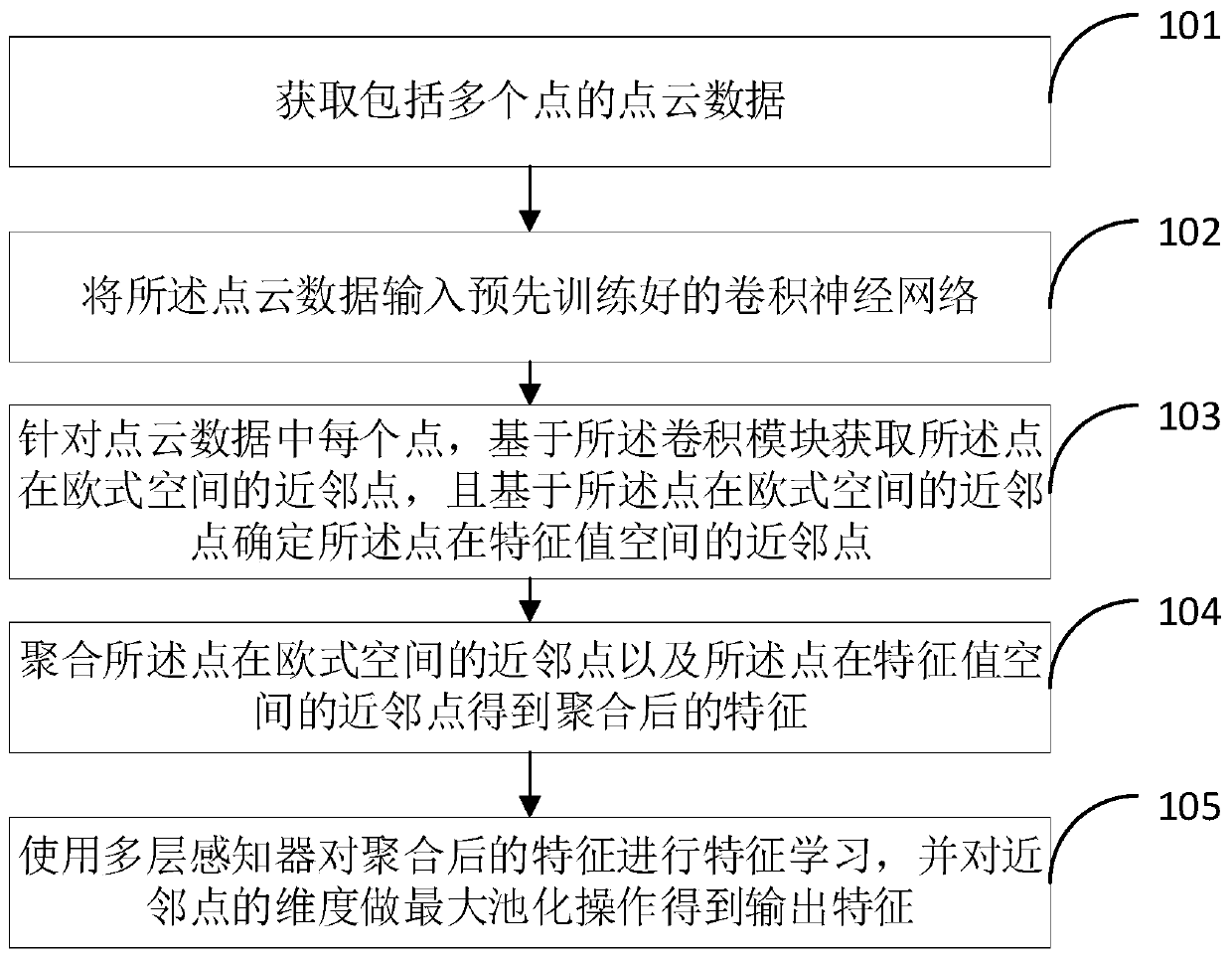
[0055] Embodiment 1 of the present invention discloses a processing method of a three-dimensional point cloud, such as figure 1 shown, including the following steps:
[0056] Step 101, obtaining point cloud data including multiple points;
[0057]Specifically, the collection of the point cloud data may be collected by a laser device, a stereo camera or a time-of-flight camera. The point cloud data collection of three-dimensional objects can be carried out by adopting the data collection method based on point cloud automatic splicing. The method of optimizing coordinate transformation parameters achieves precise registration of point clouds from different angles.
[0058] In a specific embodiment, the method further includes: by rotating the points in the point cloud data, and / or making the point coordinates of the points in the point source data perturb within a predetermined range around the point, to Enhance the point cloud data;
[0059] And / or, randomly delete the poin...
Embodiment 2
[0099] The embodiment of the present invention also proposes a processing device for a three-dimensional point cloud, such as Figure 5 shown, including:
[0100] An acquisition module 201, configured to acquire point cloud data comprising a plurality of points;
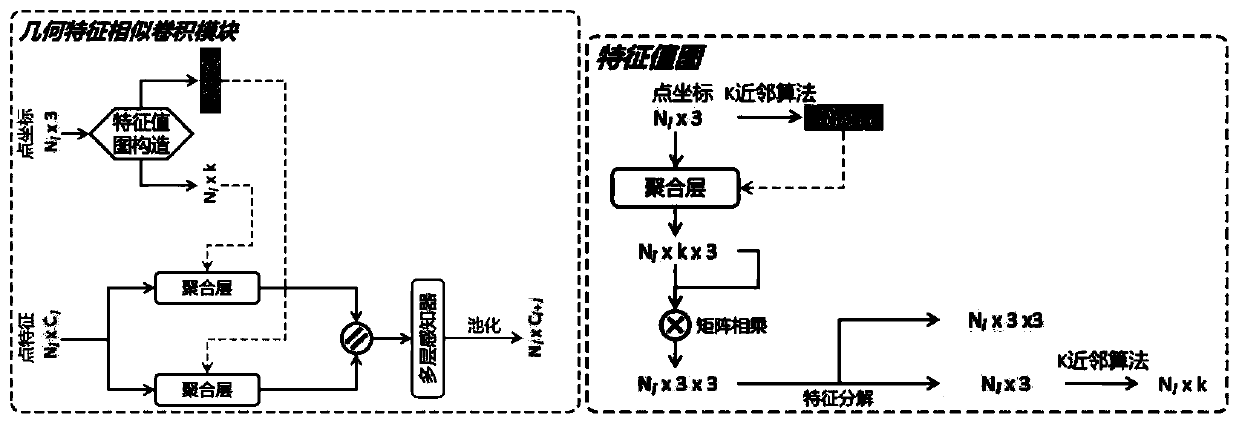
[0101] The input module 202 is used to input the point cloud data into a pre-trained convolutional neural network; the convolutional neural network includes: a convolutional module for sharing geometric feature information;
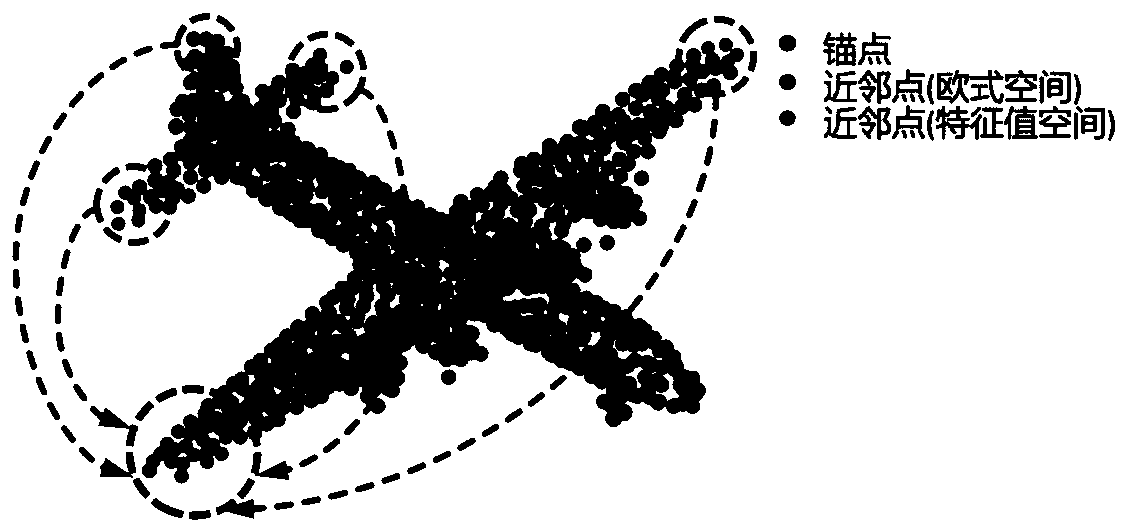
[0102] The processing module 203 is used to obtain, for each point in the point cloud data, the neighbor points of the point in Euclidean space based on the convolution module, and determine the feature value of the point based on the neighbor points of the point in Euclidean space Neighbors in space;
[0103] The aggregation module 204 is used to aggregate the adjacent points of the point in the Euclidean space and the adjacent points of the point in the eigenvalue space to obtain the aggrega...
Embodiment 3
[0107] The embodiment of the present invention also proposes a three-dimensional point cloud processing device, including a memory, a processor, and a computer program stored in the memory and operable on the processor, and the processor executes the computer program Realize the steps of the processing method of the three-dimensional point cloud in embodiment 1 at the same time.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More