

An Adaptive Loading and Recovery System for Multi-Scale Underwater Robots
An underwater robot and recovery system technology, which is applied to underwater ships, underwater operation equipment, motor vehicles, etc., to achieve the effect of enhancing combat level and capability, expanding the scope of scientific research, and expanding the types of tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings.
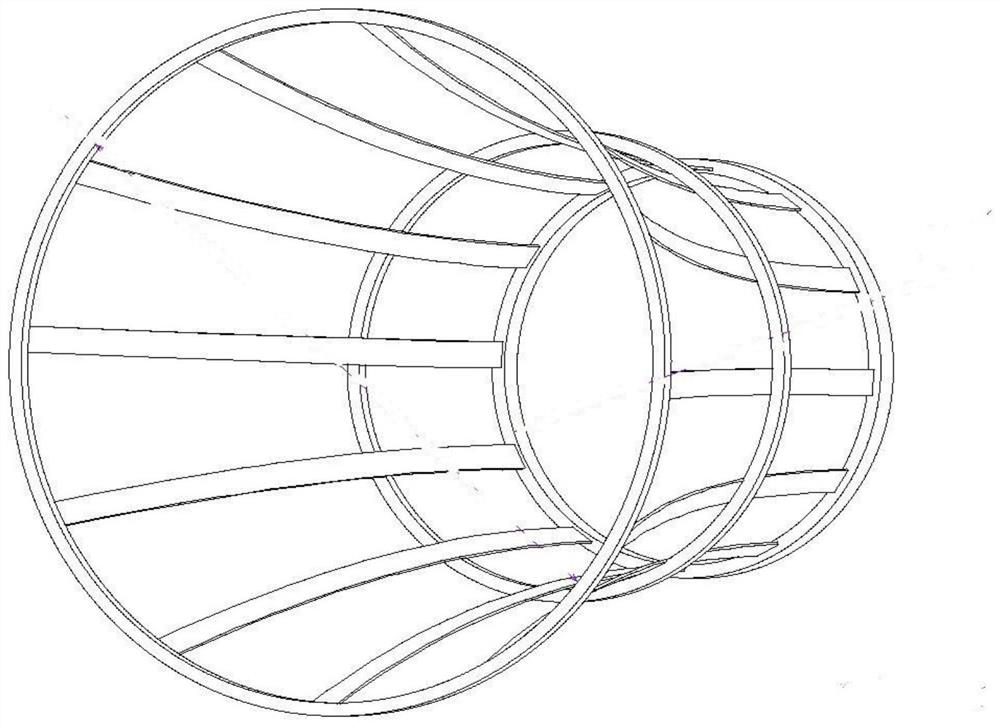
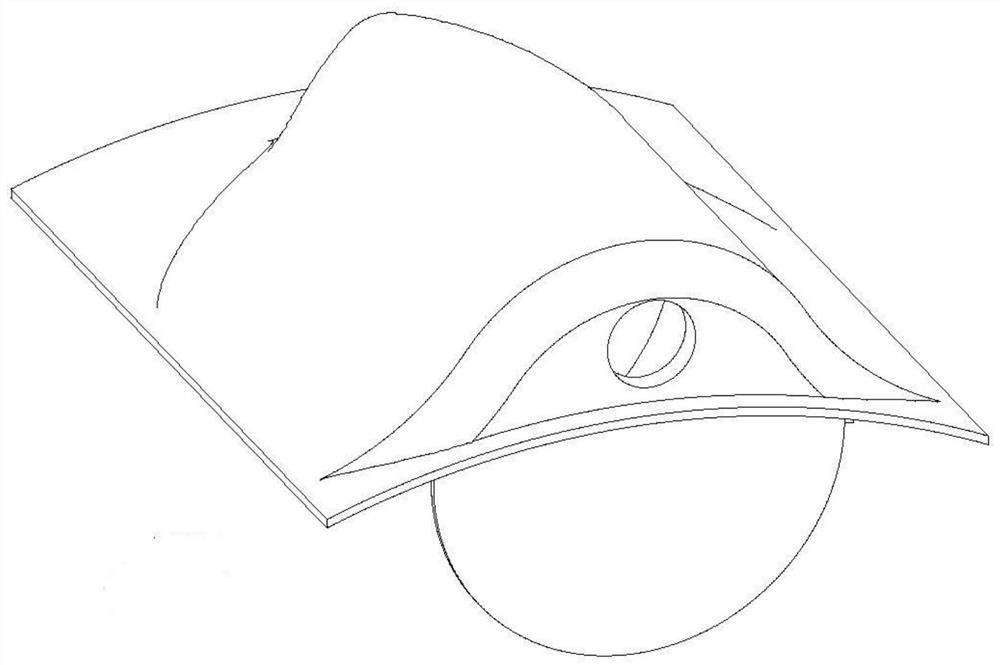
[0016] In the figure: 1-conical guide cover, 2-bearing, 3-turntable, 4-recovery bin, 5-worm gear, 6-guiding cover.
[0017] The present invention aims to solve the technical problem in the prior art that no recovery device can recover multiple AUVs at one time. For this reason, an object of the present invention is to propose an adaptive carrying recovery system for multi-scale underwater robots.
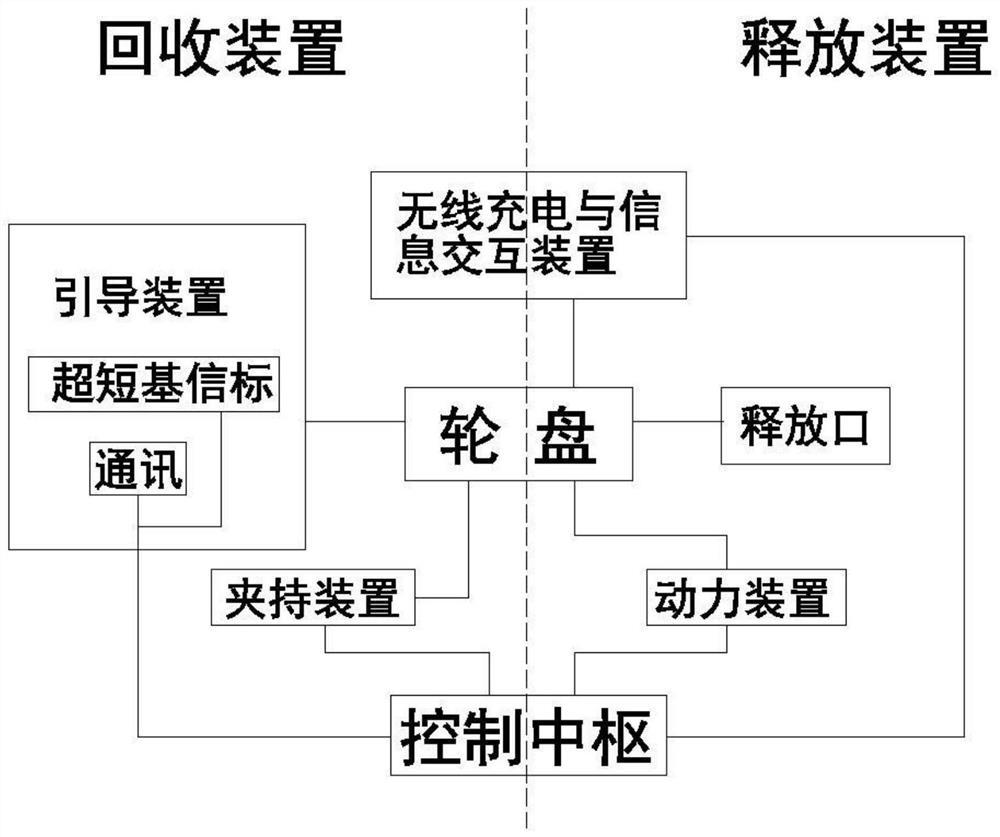
[0018] According to the present invention, a multi-scale underwater robot self-adaptive loading recovery system includes a runner structure, a clamping structure, a drive structure, a control structure, and the runner structure includes a guide cover and a turntable. The guide cover is designed to be detachable and can be replaced in time after damage. The turntable realizes the docking between the empty warehouse and the AUV in the form of rotation by combining the existi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More