

Industrial robot tail end motion sensing device and industrial robot tail end motion sensing identification method
An industrial robot and motion sensing technology, applied in the field of robotics, to prevent fatigue damage and simplify the trajectory planning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
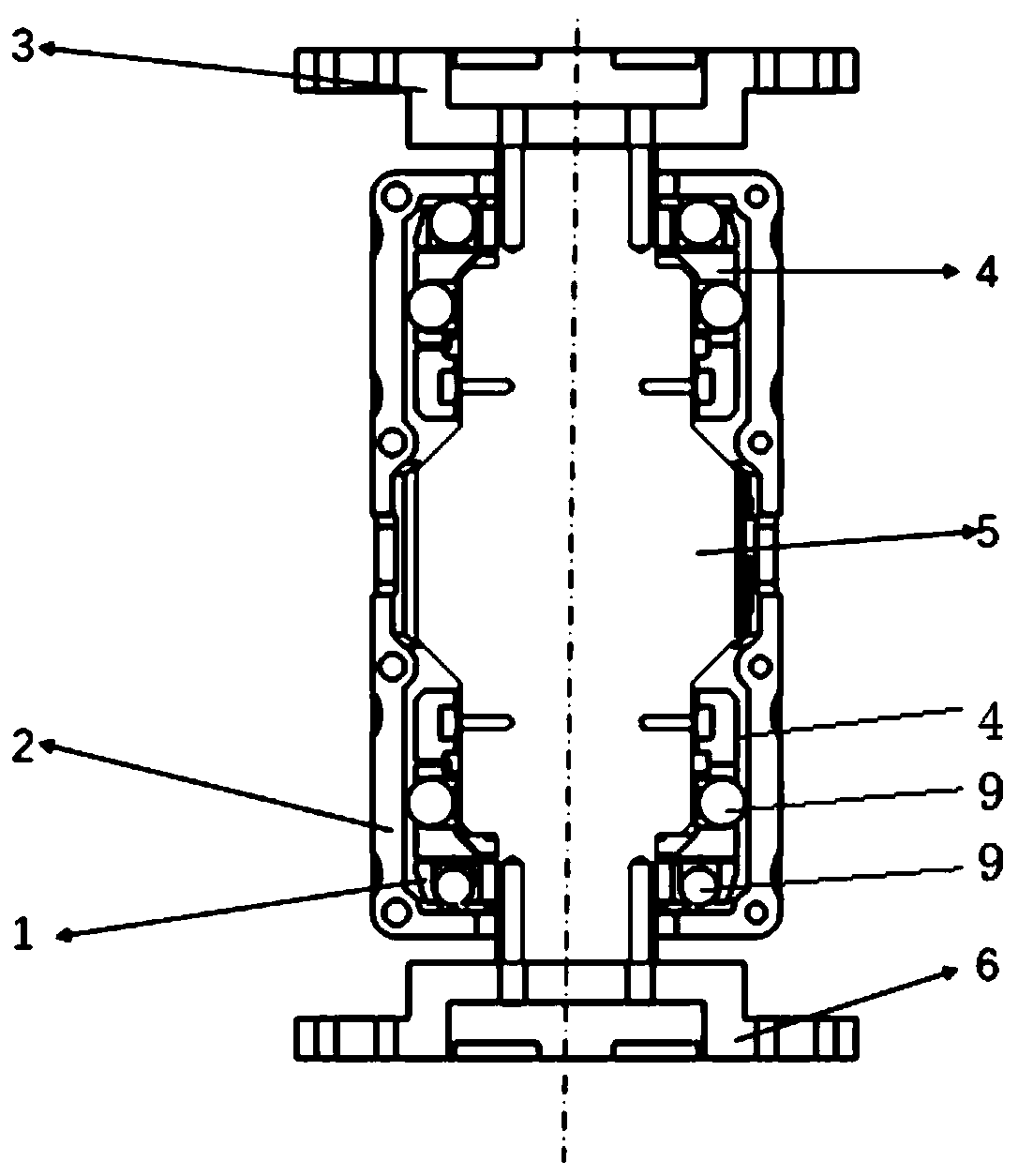
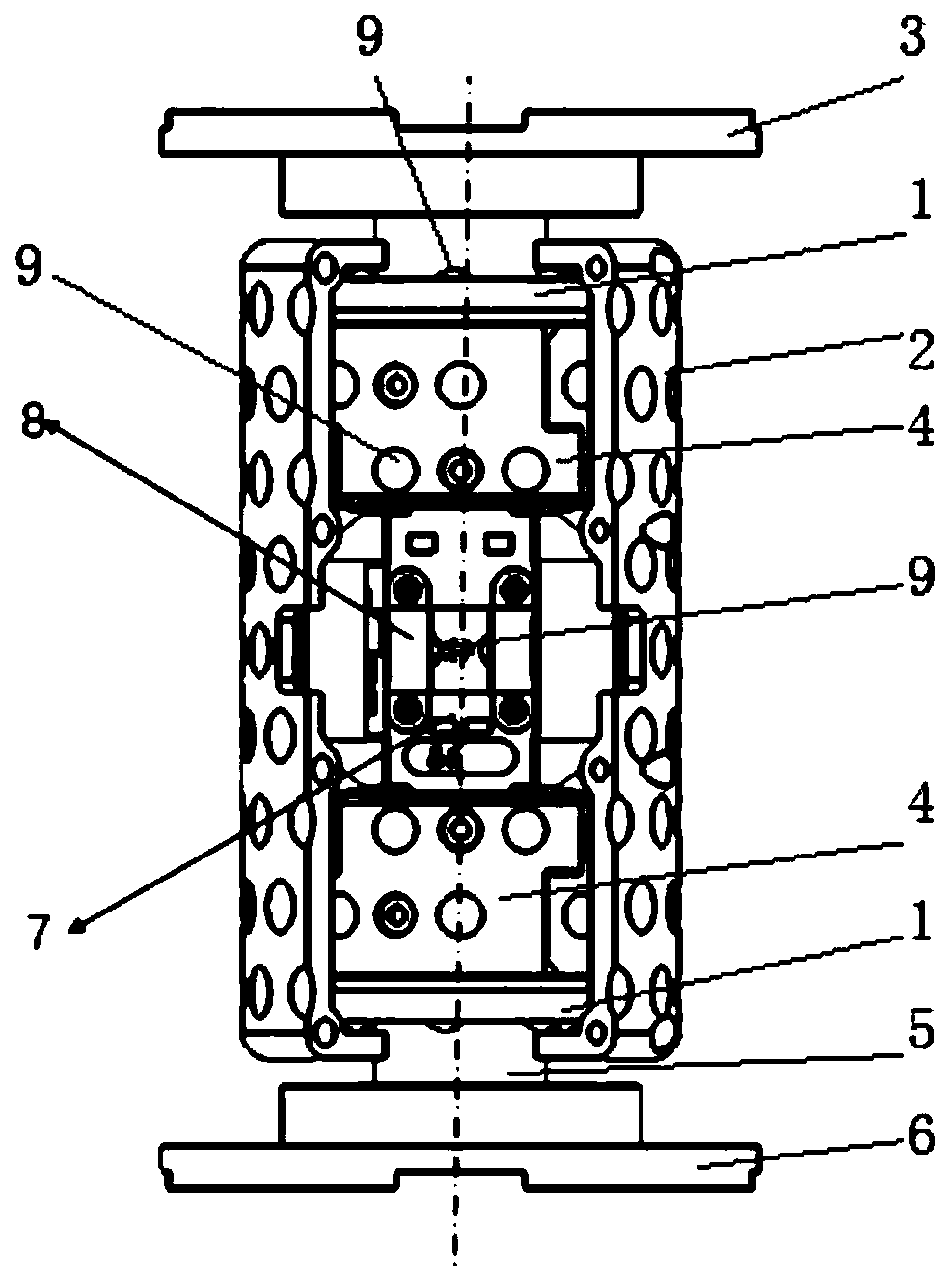
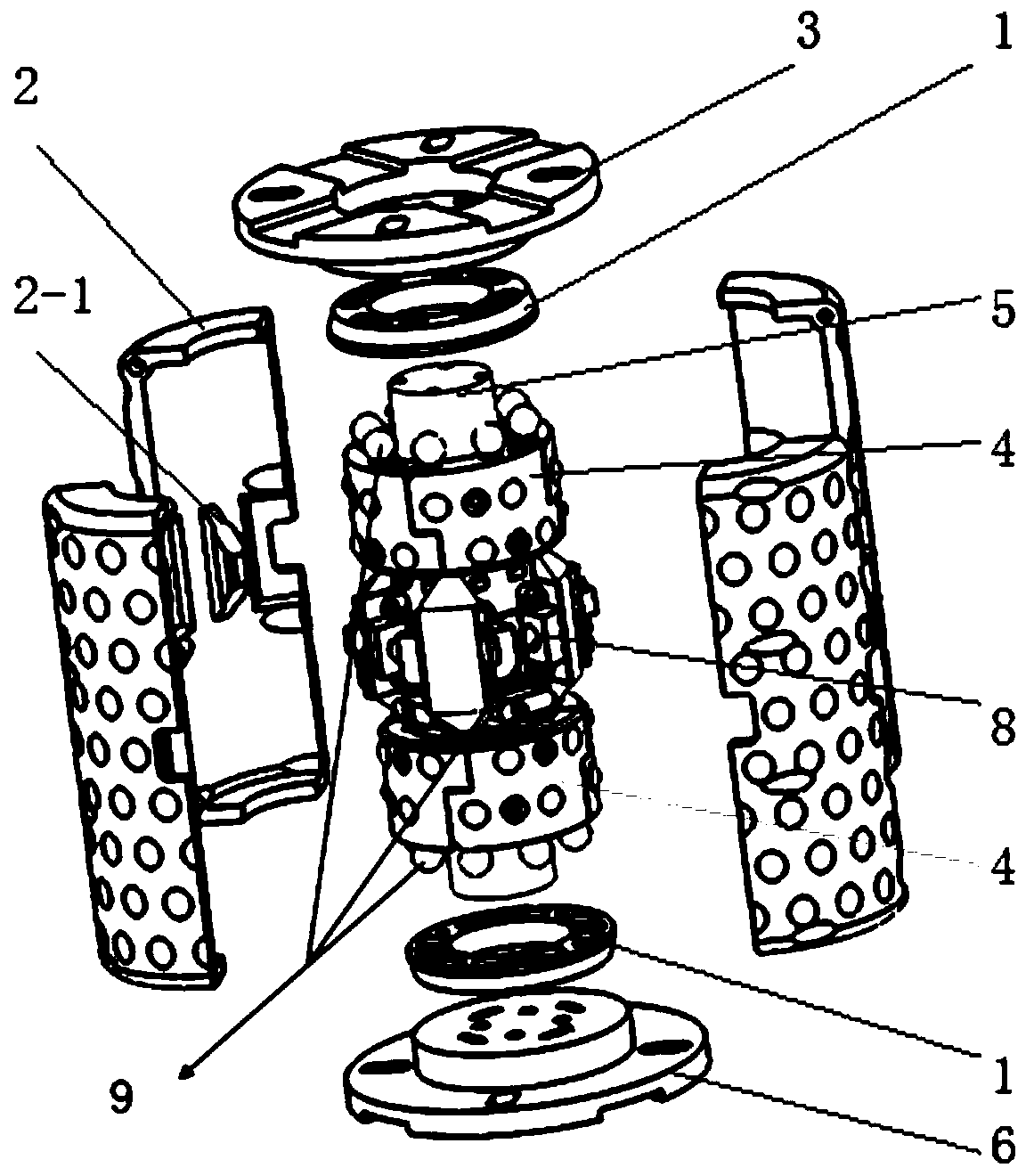
[0038] see Figure 1 ~ Figure 3 , the industrial robot terminal motion sensing device of the present invention includes a housing 2, an upper connecting flange 3, a rigid shaft 5, a lower connecting flange 6 and a flexible PCB board 7, the housing 2 is a hollow housing, and the housing 2 is set on a rigid Outside the shaft 5, the housing 2 is coaxial with the rigid shaft 5, and the two ends of the rigid shaft 5 pass through the two bottom surfaces of the housing 2 respectively, and the upper connecting flange 3 and the lower connecting flange 6 are respectively connected to the upper and lower sides of the rigid shaft 5. Both ends are rigidly connected; on the rigid shaft 5, a pressure plate is fixedly connected to the part located in the housing 2, and between the pressure plate and the housing 2, there are multiple spherical balls that can sense the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More