

Joint calibration method based on laser radar and camera and computer readable storage medium
A lidar and joint calibration technology, applied in the field of calibration, can solve the problems of depth discontinuity, inaccurate calibration edge points, affecting the accuracy of calibration results, etc., to avoid the problem of insufficient accuracy and achieve the effect of accurate calibration results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
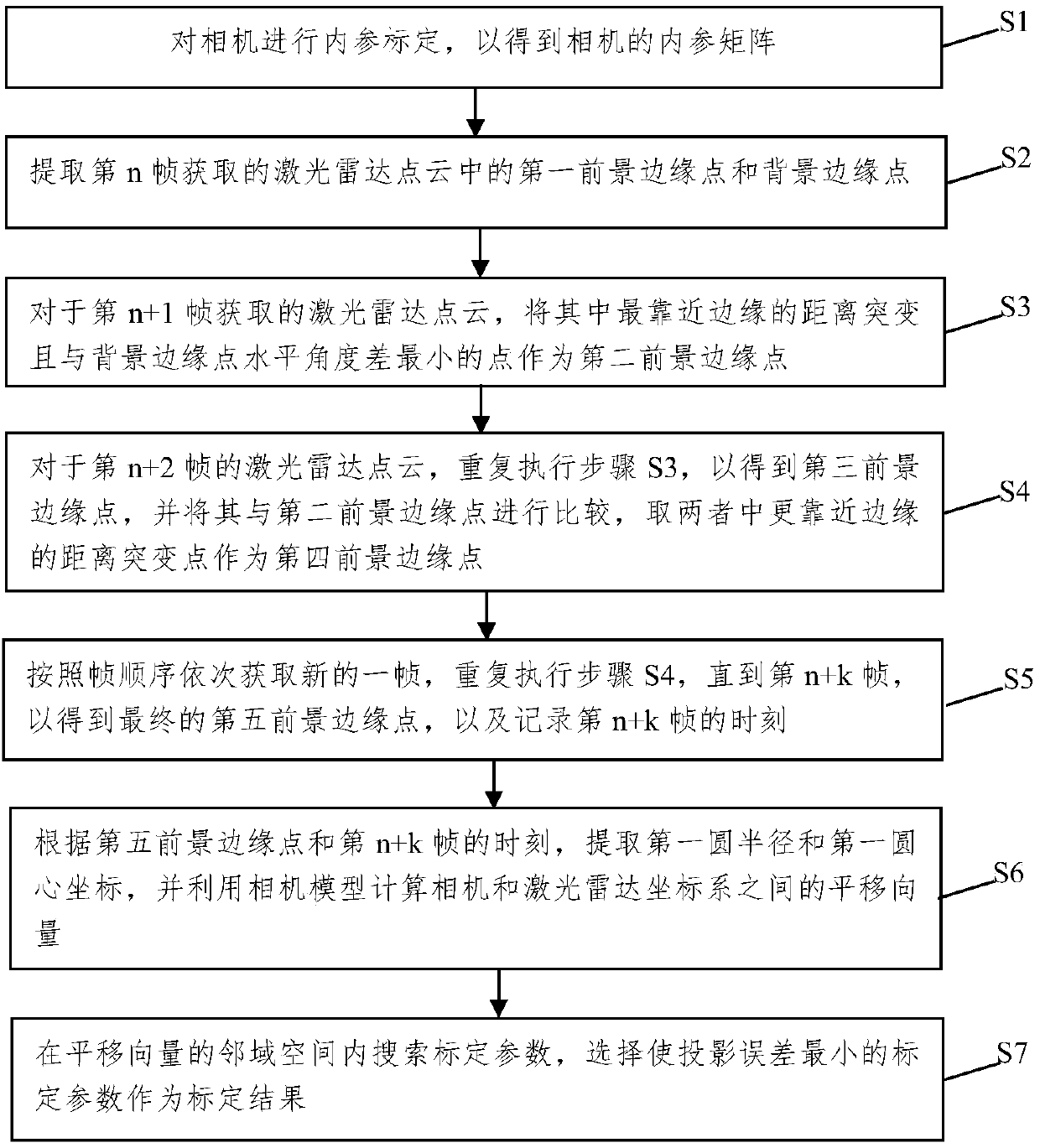
[0022] In order to make the purposes, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. Obviously, the described embodiments It is a part of the embodiments of this application, but not all of them. Based on the embodiments in the present application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present application.
[0023] The embodiment of this application provides a joint calibration method based on lidar and camera, such as figure 1 As shown, the joint calibration method may include the following steps:
[0024] Step S1, perform internal reference calibration on the camera to obtain the internal reference matrix of the camera.
[0025] In this...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More