

An Unmanned Vehicle Obstacle Avoidance Method Based on Circular Trajectory Cells
A technology of circular trajectory and unmanned boats, applied in two-dimensional position/channel control, instruments, control/regulation systems, etc., to achieve the effect of avoiding static and dynamic obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051]In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be further described in detail below with reference to the embodiments. It will be appreciated that the specific embodiments described herein are intended to explain the present invention and is not intended to limit the invention.
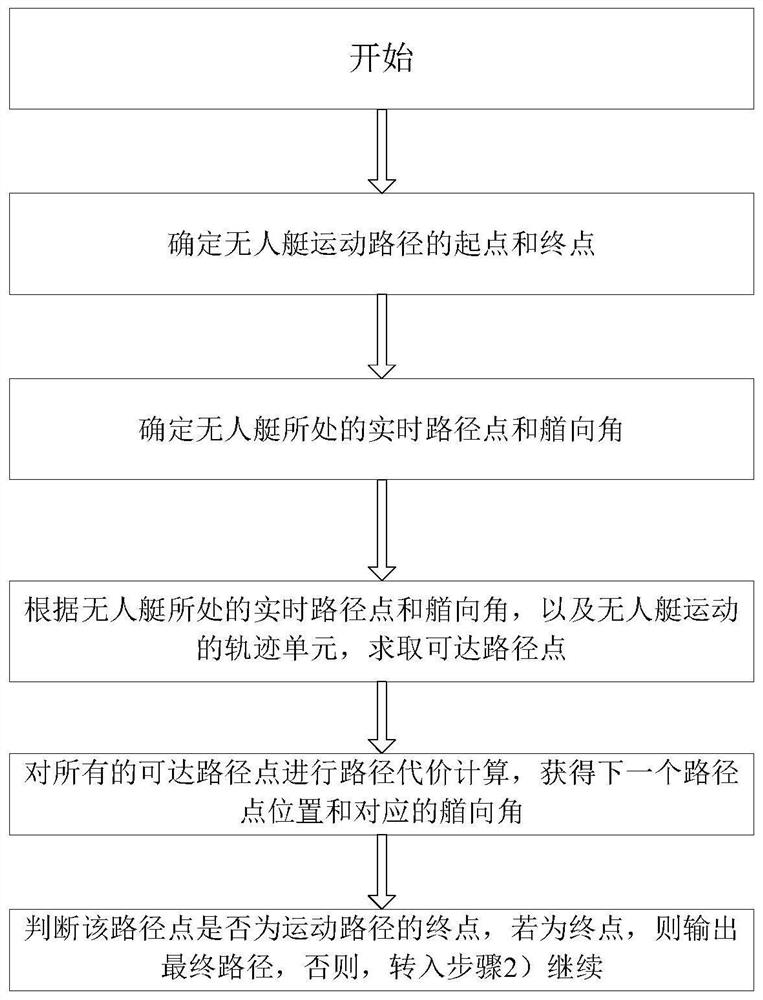
[0052]Such asfigure 1 As shown, a non-human boat avoidance method based on a circular trajectory unit includes the following steps:
[0053]1) Determine the starting point and end point of the drowning path;
[0054]2) Determine the real-time path point and the angle of the unoccupied;
[0055]3) According to the real-time path point and the trajectory unit, the path point of the unoccupied, the path point where the unoccupied movement is located, and the path point where the obstacle is located;
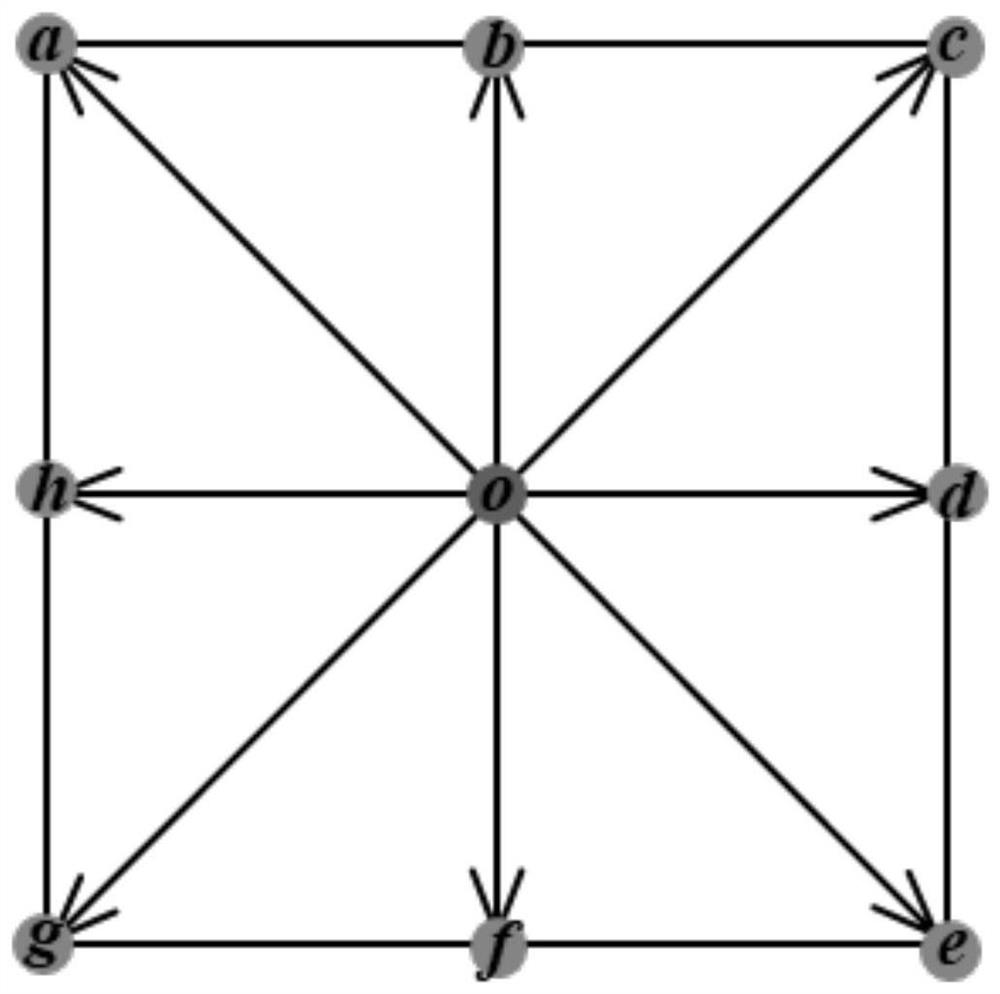
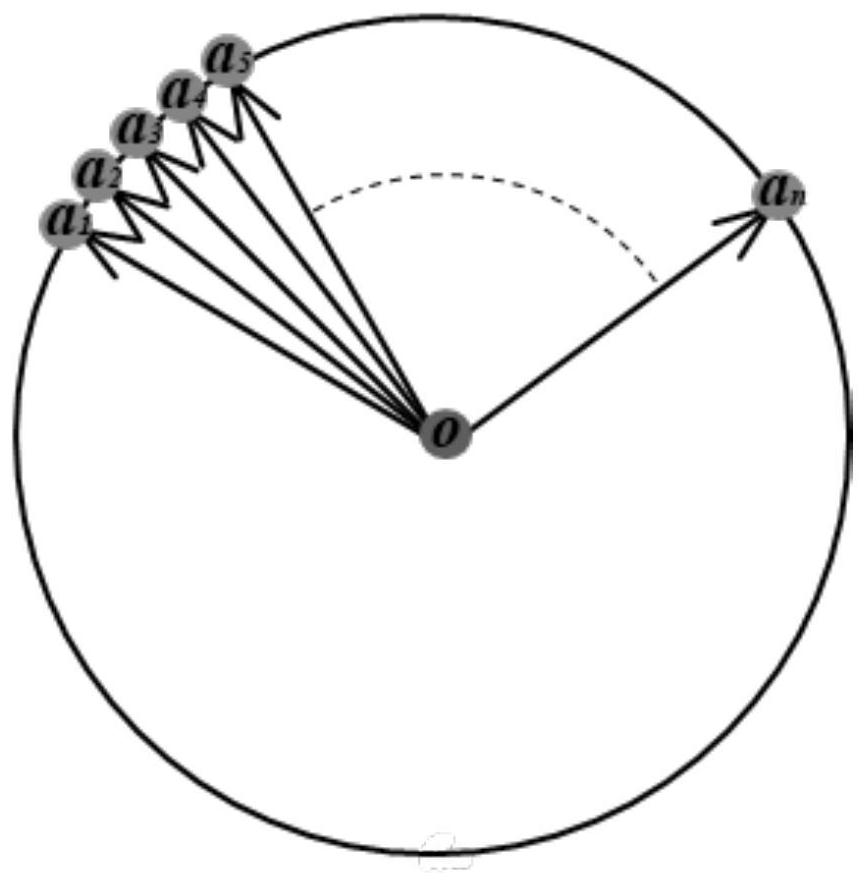
[0056]The method of forming the trajectory unit is as follows:
[0057]3.1) Use the MMG model to moderate the drownboat, and obtain the movement traje...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More