AGV traffic control scheduling method and storage device
A technology of traffic control and scheduling method, applied in traffic control system, traffic control system of road vehicles, traffic flow detection, etc., can solve the problem of “traffic jam” for too long, affecting transportation efficiency, etc., to reduce traffic jams and ensure reliable Ta data Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
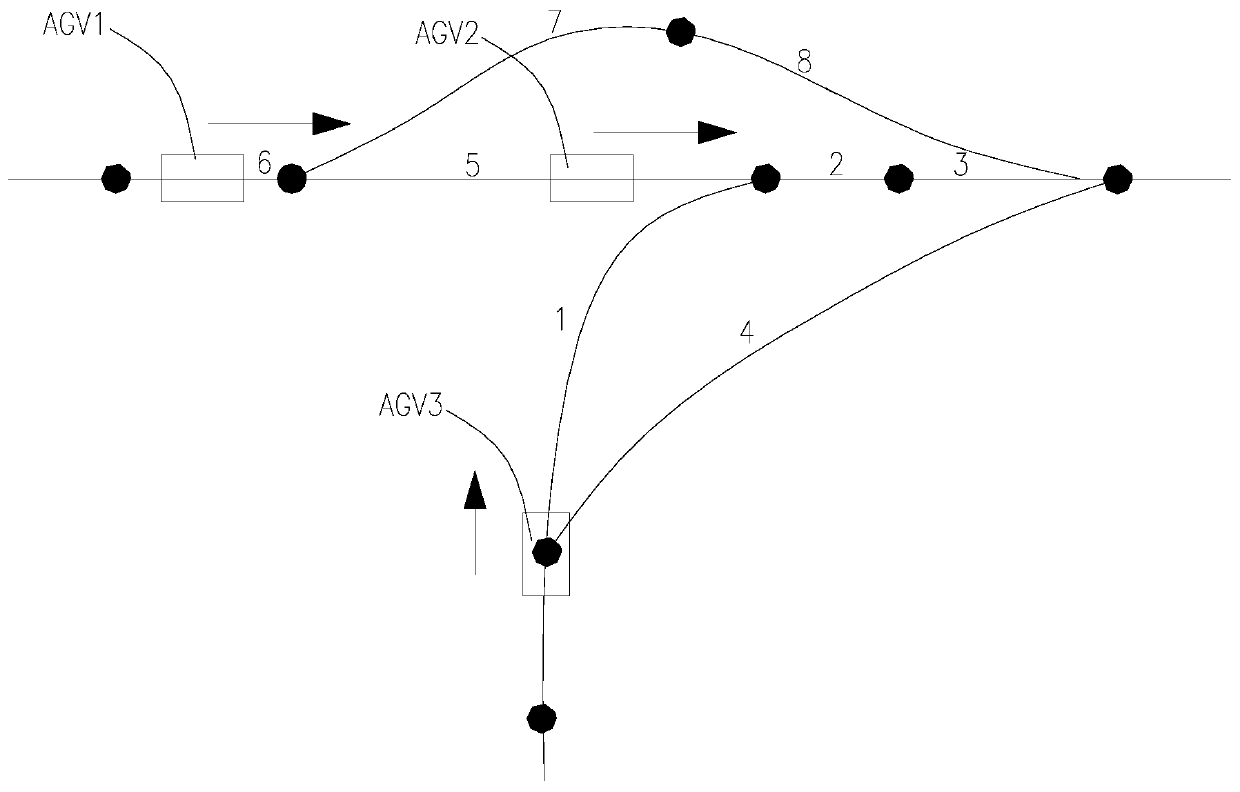
[0028] see figure 1 , the AGV traffic control scheduling method of the present invention includes a central control center, a data storage module, some AGVs and a network path map; a number of path points are discretized in the network path map, and the connection of several path points forms the driving path of the AGV. The starting point and the target point of the AGV driving are respectively selected in the way points, and the AGV can reach the target point through other way points from the starting point or directly reach the target point. The traffic control area is the same area where multiple AGVs exist or the intersecting area of multiple paths, and the AGV can bypass the traffic control area to reach the target location through the detour path.
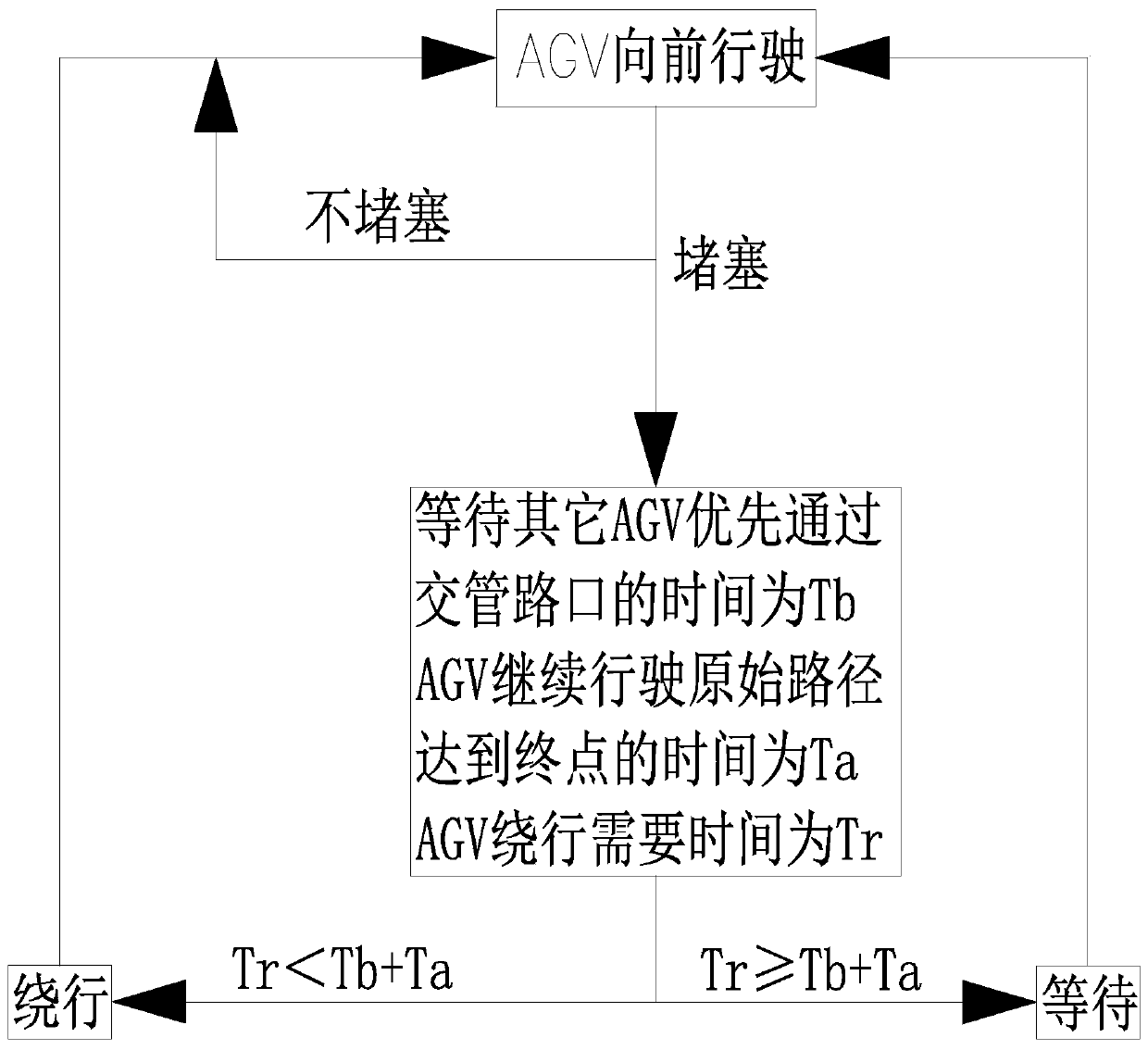
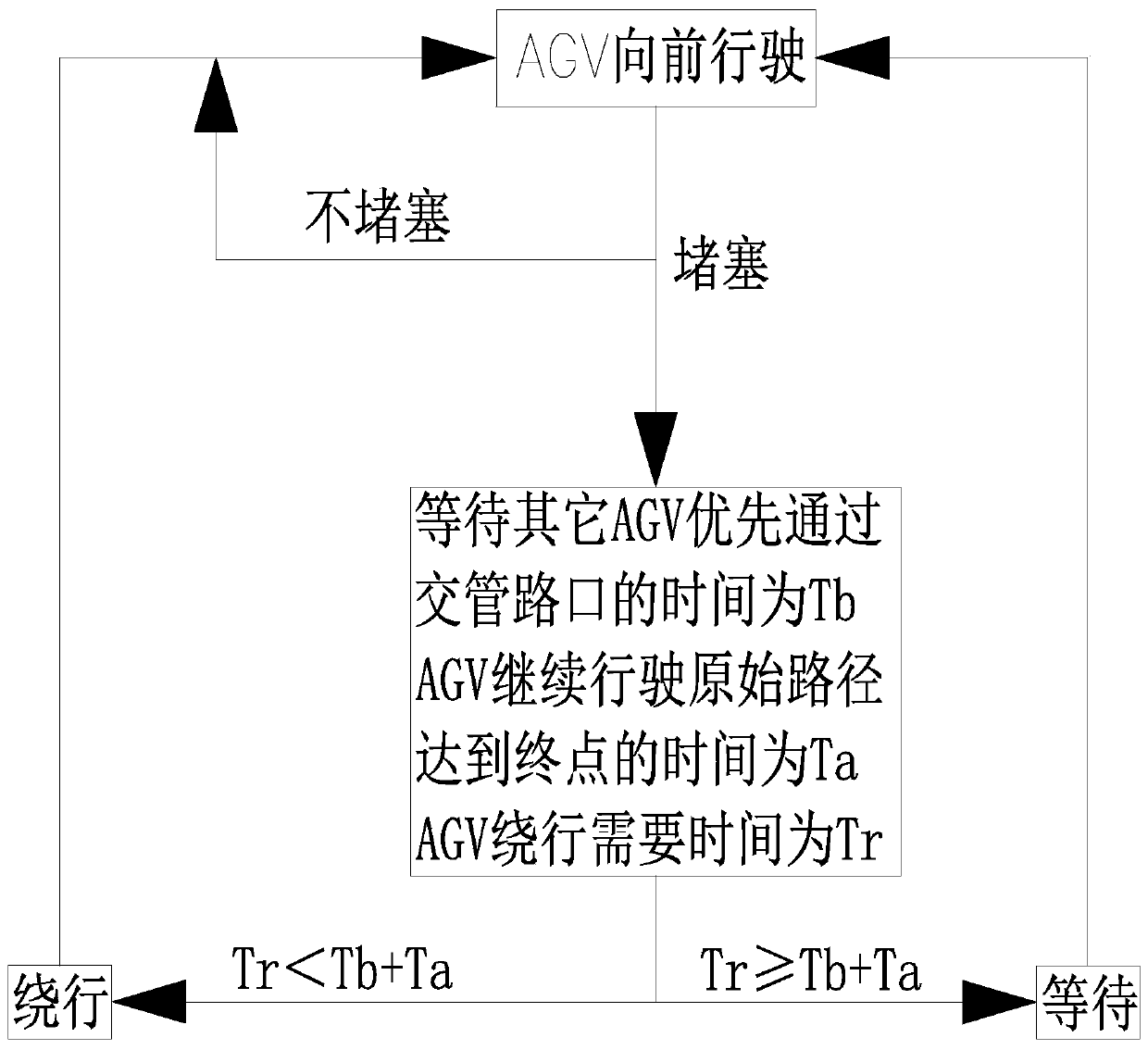
[0029] When the central control center detects that there are AGVs traveling to the traffic control area through the original route in the network route diagram, it needs to wait for other AGVs to drive first. The central ...
Embodiment 2
[0045] In the storage device of the present invention, the storage device stores a plurality of execution instructions. When the central control center detects that there is an AGV traveling to the traffic control area via the original route in the network path diagram, it needs to wait for other AGVs to travel first. The execution instructions are used for the central control The hub loads and does the following:
[0046] a. The central control center retrieves and calculates the average travel time Ta of the AGV passing through the traffic control area each time from the data storage module.
[0047] b. The central control center calculates the consumption time Tc of the sum of the time Tb of the AGV waiting for other AGVs to pass through the traffic control area first and the average travel time Ta of the original route through the traffic control area.
[0048] c. The central control center calculates the travel time Tr of the AGV's detour route.
[0049] d. By comparing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com