

Coordinated control method for trajectory tracking of rocker rocker planetary rover in soft and rough terrain
A technology of coordinated control and trajectory tracking, applied in vehicle position/route/height control, control/regulation system, non-electric variable control, etc., to achieve the effect of reducing internal force loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
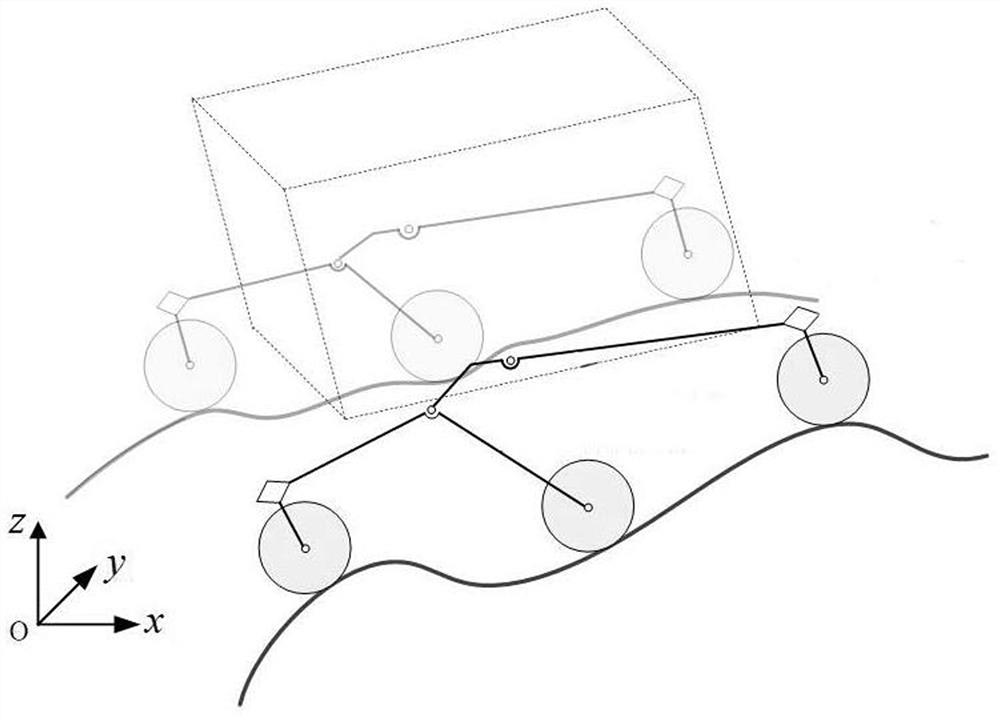
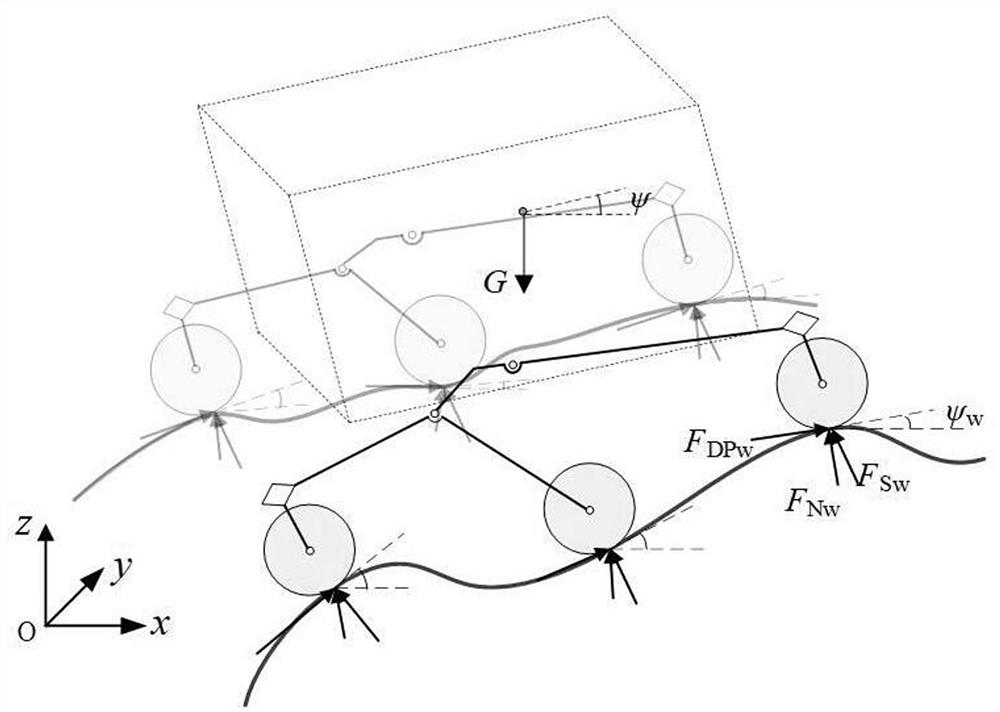
[0020]By the followingfigure 1 Adherentimage 3Further explanation of the invention.
[0021]A rocker rocker-style planet trajectory tracking coordination control method in a soft rugged terrain, including the following steps:
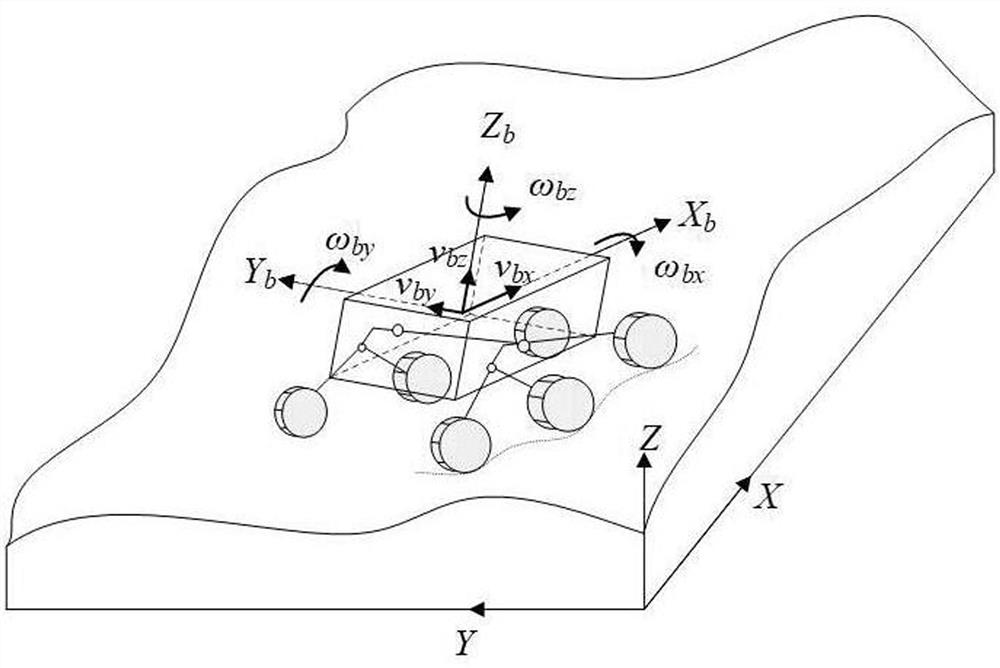
[0022]a) Defining the position information of the Placle Car in the World Coordinate System (X, Y, Z), the horizontal rolling angle of the planet car isThe pitch angle is ψ, the yaw angle is θ, in the direction in which the carriage body is in the X-axis positive direction, and the carrier coordinate system is established in accordance with the right hand according to the right hand.bYb,zb), The speed of the vehicle body in the vehicle body coordinate system is (VBX , VBY , VBZ ), Through formulaBuilding a three-dimensional kinematic model of the vehicle body, where Q is position vector, q = (x, y, z),The result of the guidance operation of Q,ΩBZ As a volley-shaped rotation angle speed, δ0For the external interference value of the system;
[0023]b) According to the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More