

Rocker and rocker arm type planet vehicle trajectory tracking coordination control method in soft and rugged terrains
A coordinated control and trajectory tracking technology, applied in vehicle position/route/height control, non-electric variable control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
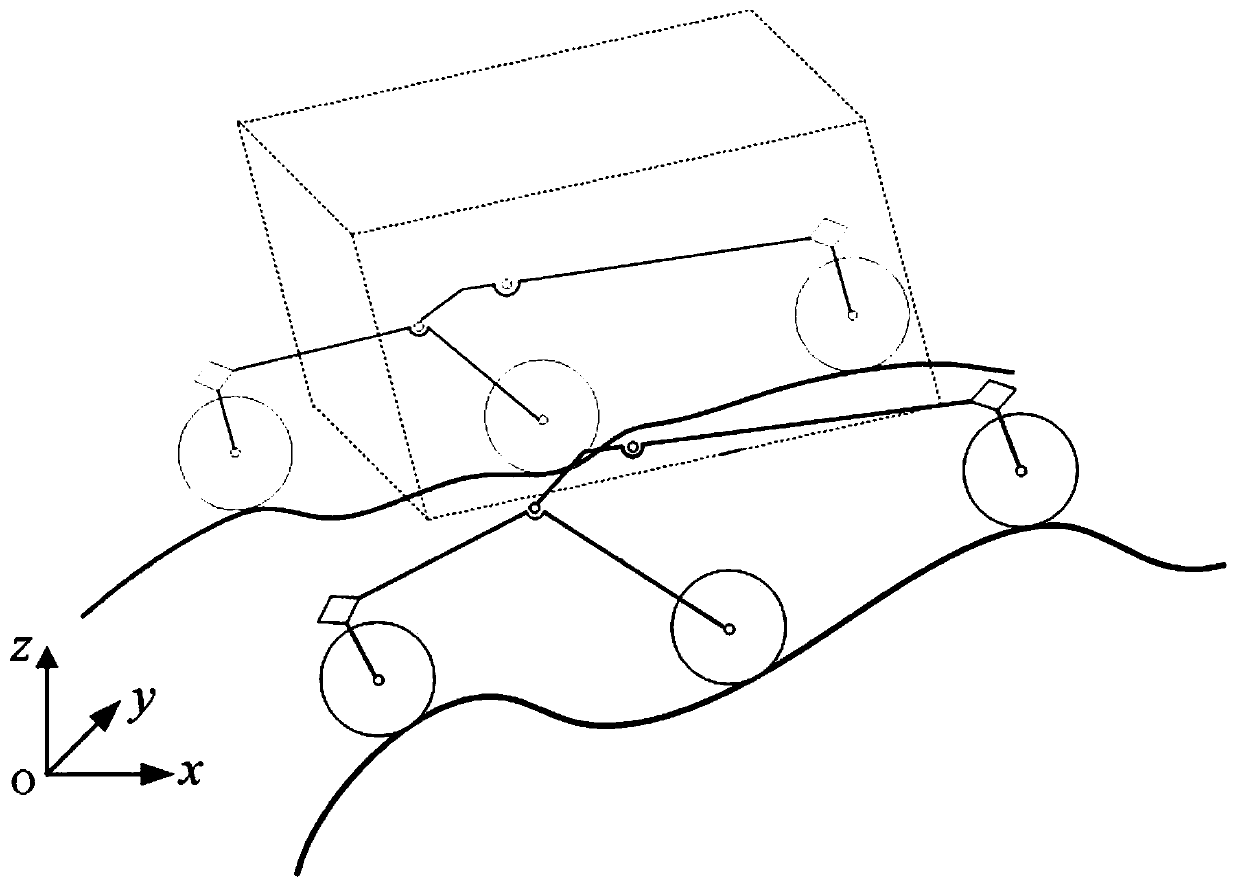
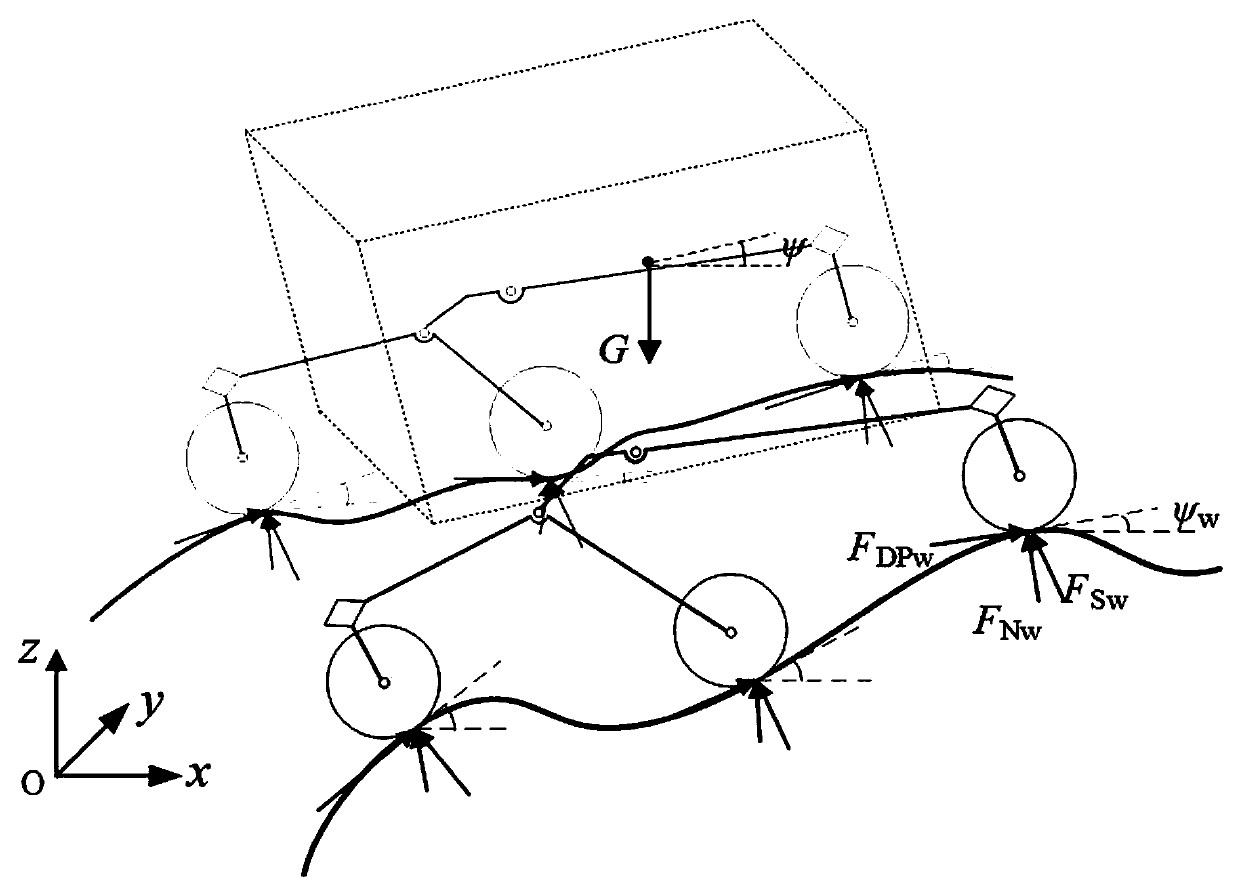
[0017] Attached below figure 1 to attach image 3 The present invention will be further described.
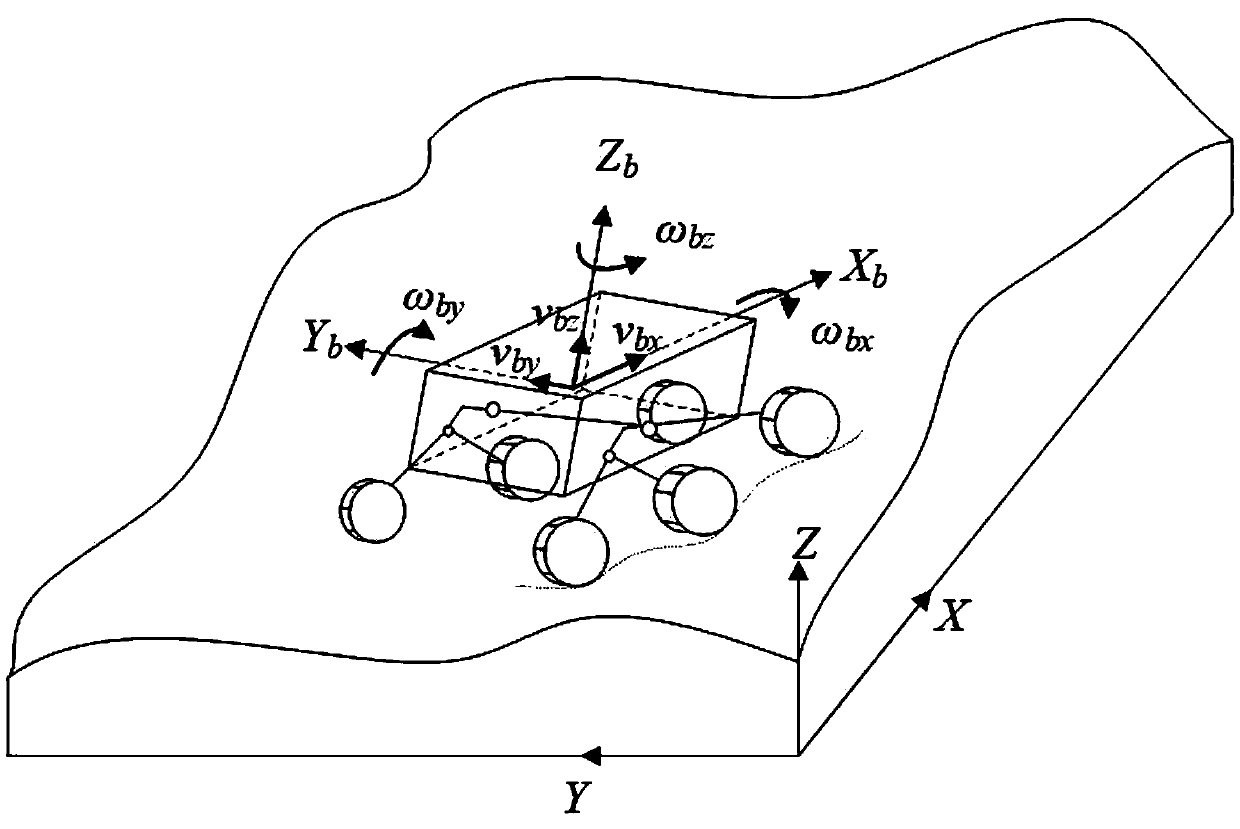
[0018] A track tracking coordination control method for a rocker rocker type planetary vehicle in soft and rough terrain, comprising the following steps: a) defining the position information of the planetary vehicle in a world coordinate system as (x, y, z), and the roll of the planetary vehicle Angle is , the pitch angle is ψ, the yaw angle is θ, the forward direction of the car body is the positive direction of the x-axis, and the upward direction perpendicular to the car body is the positive direction of the z-axis, and the car body coordinate system is established according to the right-hand rule (x b ,y b ,z b ), the velocity of the body centroid in the body coordinate system is (v bx ,v by ,v bz ), by the formula Establish a three-dimensional kinematics model of the car body, where q is the position vector, q=(x, y, z), is the result of the derivation operation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More