

Target object positioning virtual-real fusion method and device
A virtual-real fusion and target object technology, which is applied in image data processing, television, instruments, etc., can solve the problem of not being able to effectively reflect the actual state of the target object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
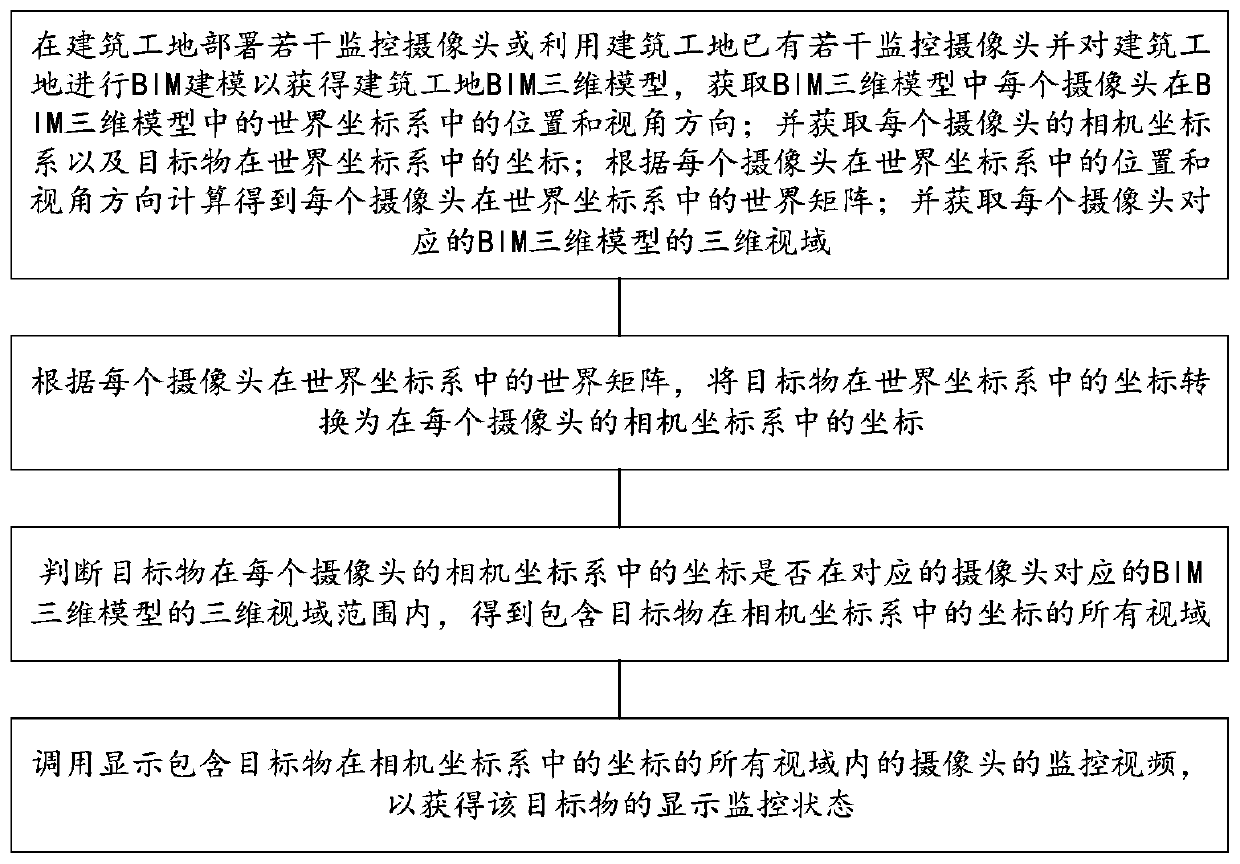
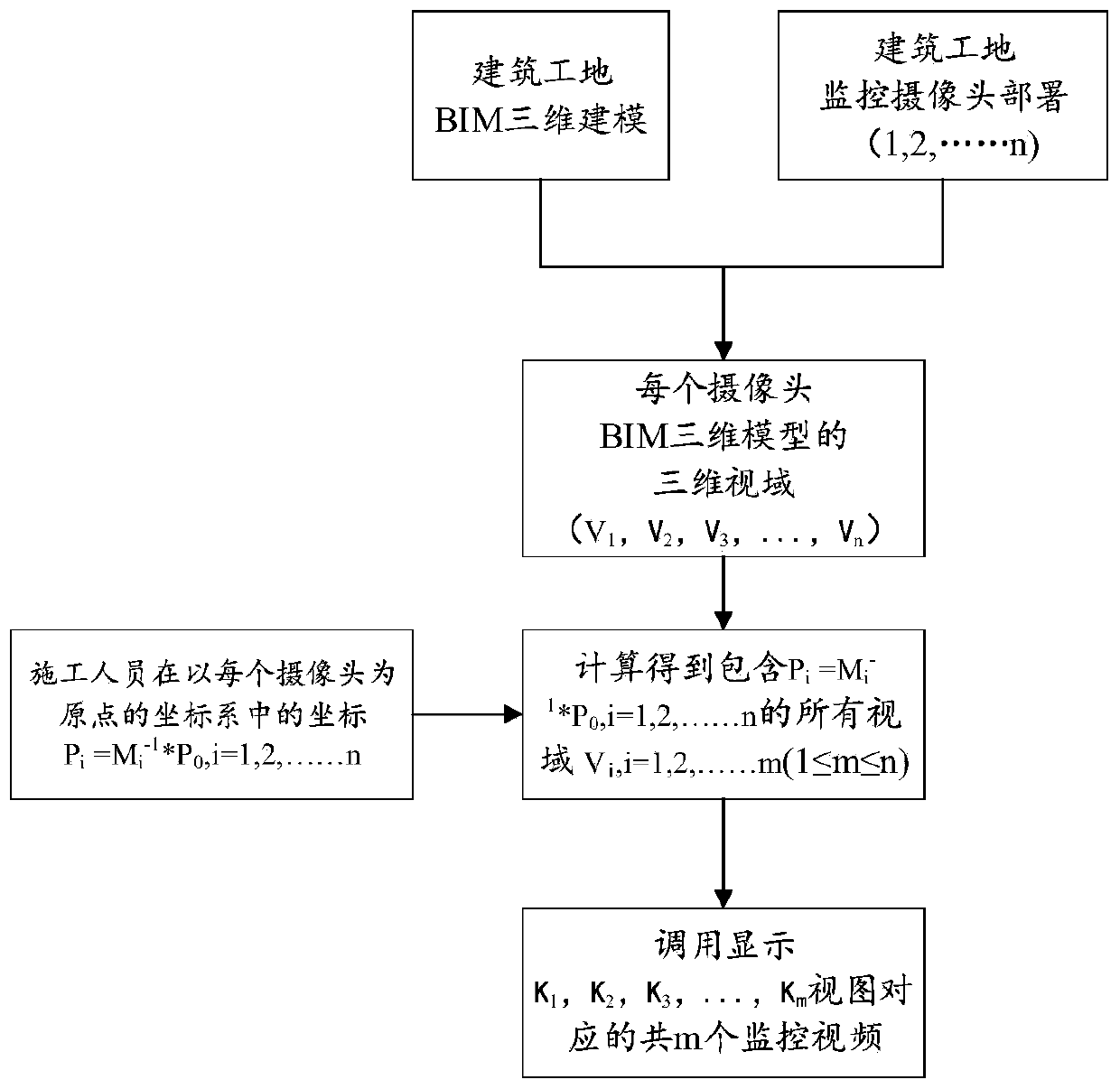
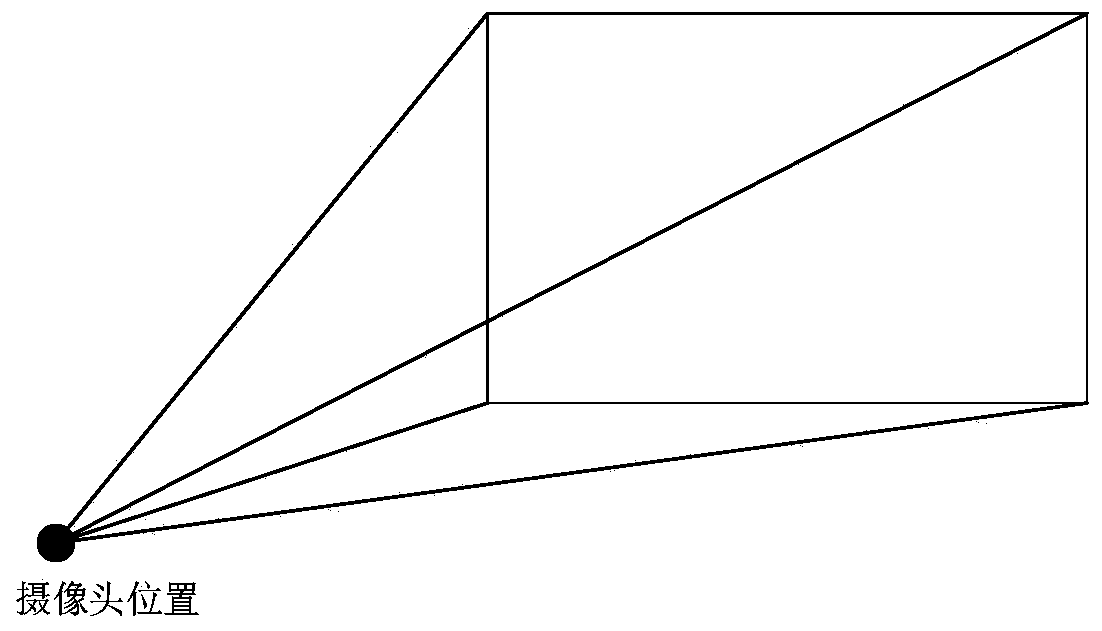
[0031] The present invention provides a virtual reality fusion method for target positioning, which is used to obtain the actual state of the target on the construction site, such as figure 1 As shown, the method includes the following steps: information acquisition step, deploying several monitoring cameras on the construction site or utilizing several existing monitoring cameras on the construction site and performing BIM modeling on the construction site to obtain a BIM three-dimensional model of the construction site, obtaining the BIM three-dimensional model in the BIM three-dimensional model The position and view direction of each camera in the world coordinate system in the BIM 3D model; and obtain the camera coordinate system of each camera and the coordinates of the target in the world coordinate system; according to the position of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More