

Mining rail type inspection climbing robot
A robot, track-type technology, applied in the field of robots, can solve the problems of reducing the friction coefficient of the walking track, slipping of the inspection robot, affecting the normal inspection, etc., to reduce frictional resistance and energy consumption, increase the cruising range, and improve the hidden dangers of safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
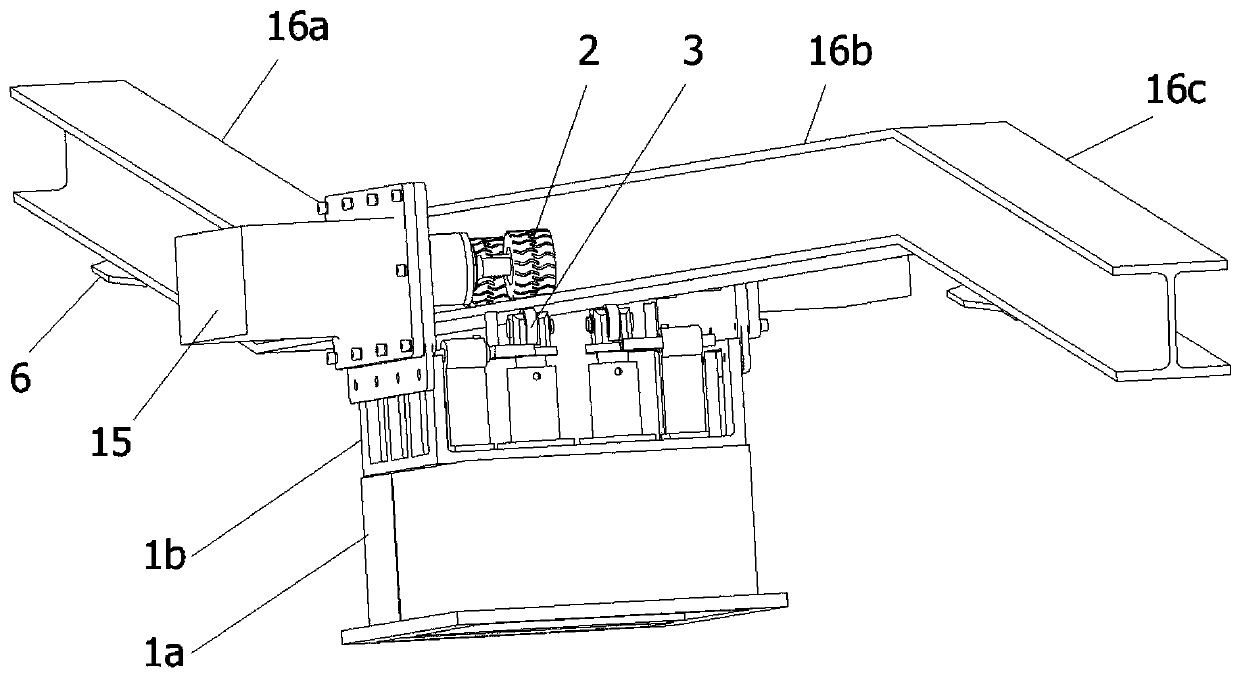
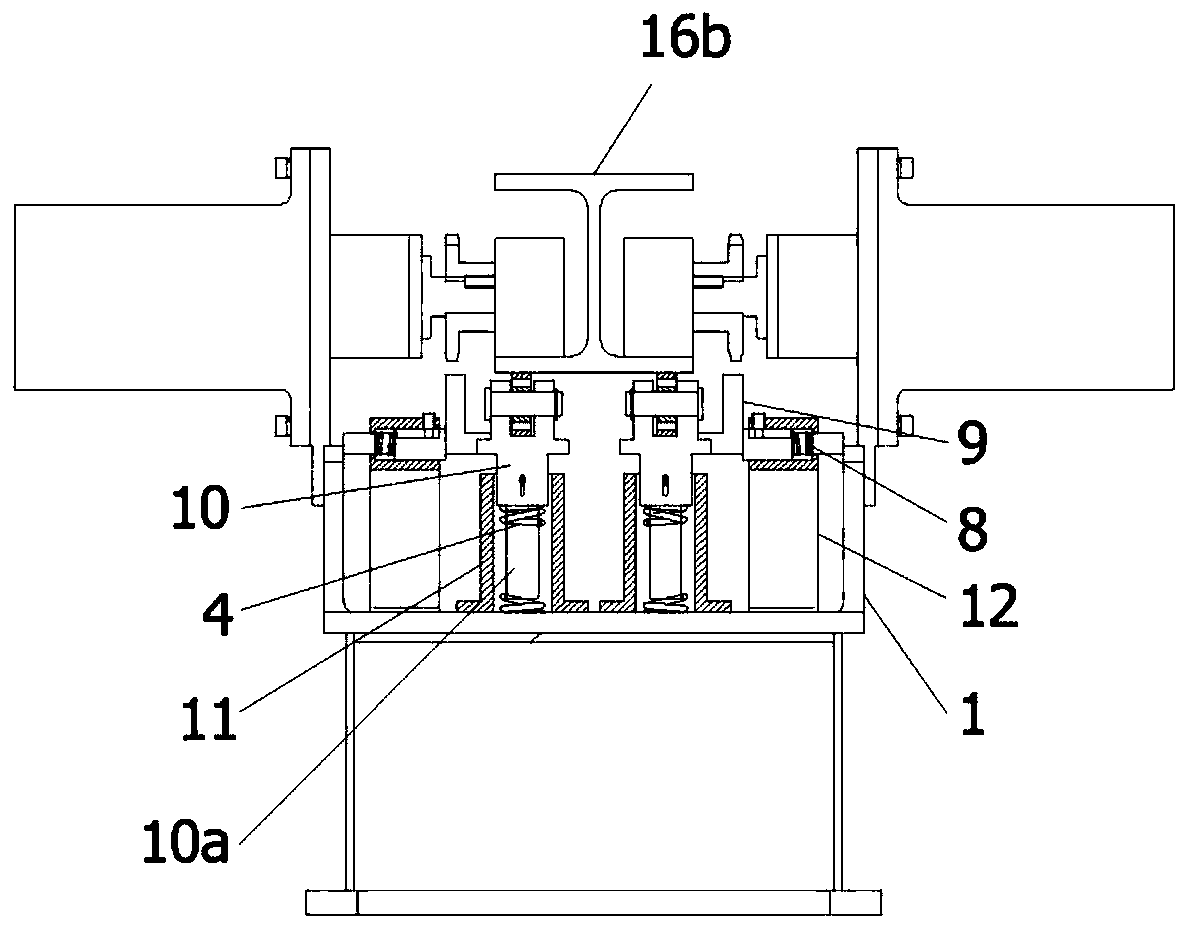
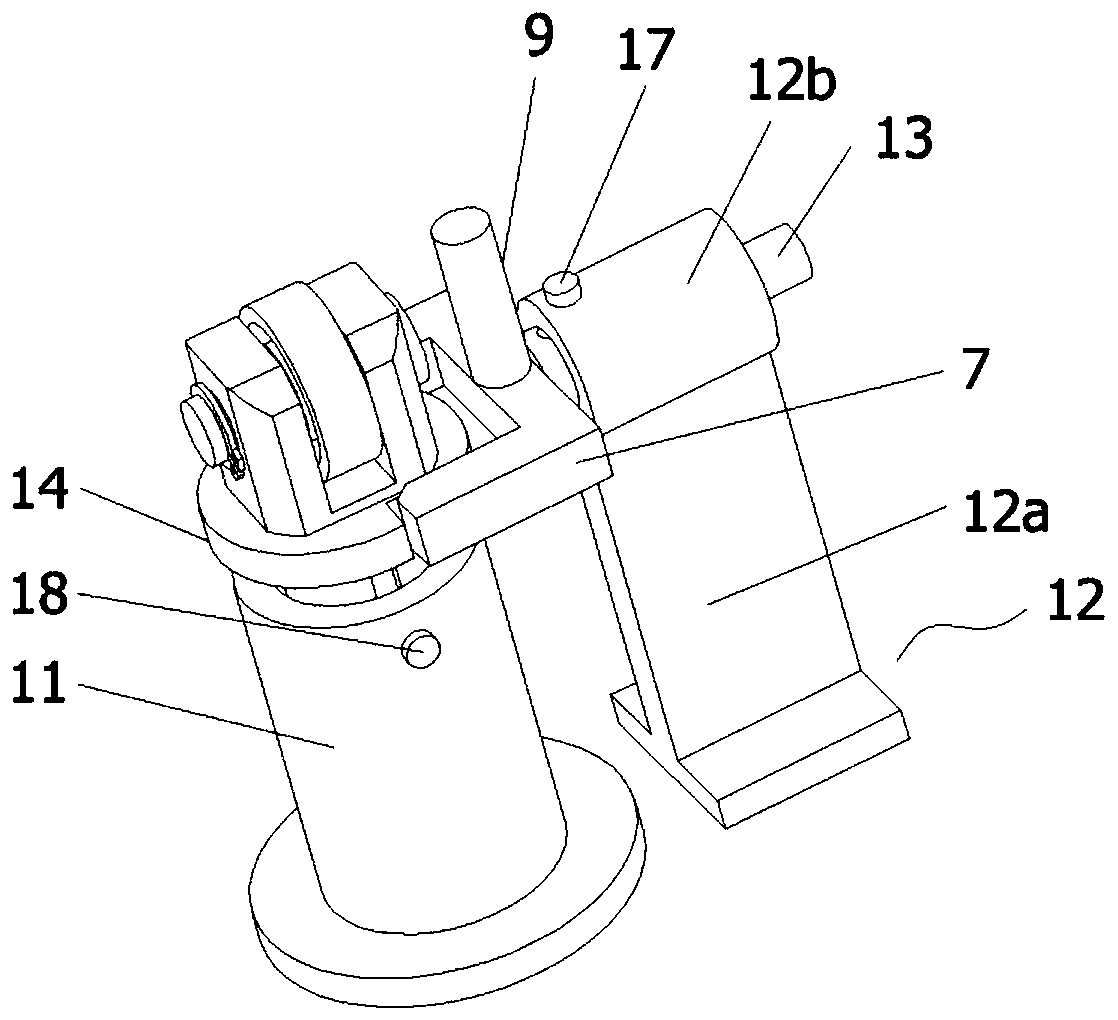
[0022] figure 1 It is a structural schematic diagram of the present invention; figure 2 It is a schematic cross-sectional structure diagram of the present invention; image 3 A diagram of the local composition; Figure 4 It is a schematic diagram of the structure of the horizontal protrusion and the vertical protrusion;
[0023] As shown in the accompanying drawings, this embodiment provides a mining track-type inspection and climbing robot, including a frame 1, which is installed on the frame and used to roll along the track wing to drive the frame to walk along the track. Wheel 2, the driving device that drives the traveling wheel to rotate, the pressing wheel 3 that is installed on the frame for pressing on the bottom of the track wing plate, and the adjusting device for adjusting the pressing wheel. When going downhill, make the pinch wheel close to the track and press against the bottom of the rail wing, and keep the pinch wheel away from the track when the robot walk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More