

Obstacle avoiding method for robot and robot equipment
A robot and obstacle avoidance technology, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve problems such as inability to achieve obstacle avoidance operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
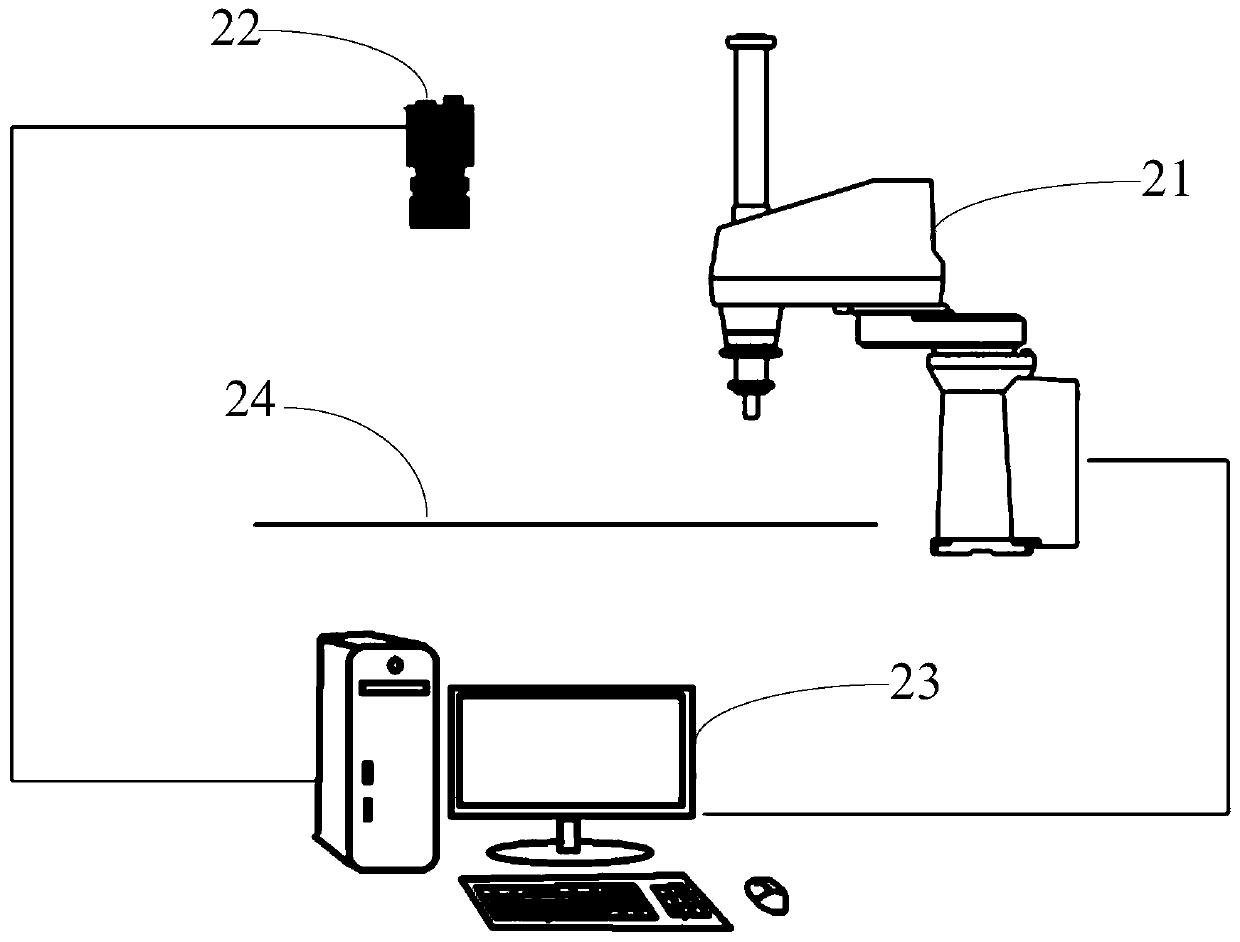
[0055] This embodiment takes the planar articulated robot as an example to describe the robot equipment provided by the embodiment of the present invention in detail, please refer to figure 2 , figure 2 It is a schematic structural diagram of a planar articulated robot in an embodiment, including: a robot body 21 , a camera 22 and a controller 23 .
[0056] Wherein, the camera 22 is used to collect images of the surrounding environment of the obstacle, and the image of the surrounding environment of the obstacle includes the starting point of the robot body, the position information of the target and the obstacle. The camera 22 in the present embodiment is arranged on the top of the working plane 24 of the robot body 21, and it can take images on the working plane 24, that is, the image of the surrounding environment of the obstacle. The working plane 24 includes the robot body 21 that needs to be grasped or For the assembled target, the starting position of the robot body ...
specific Embodiment approach
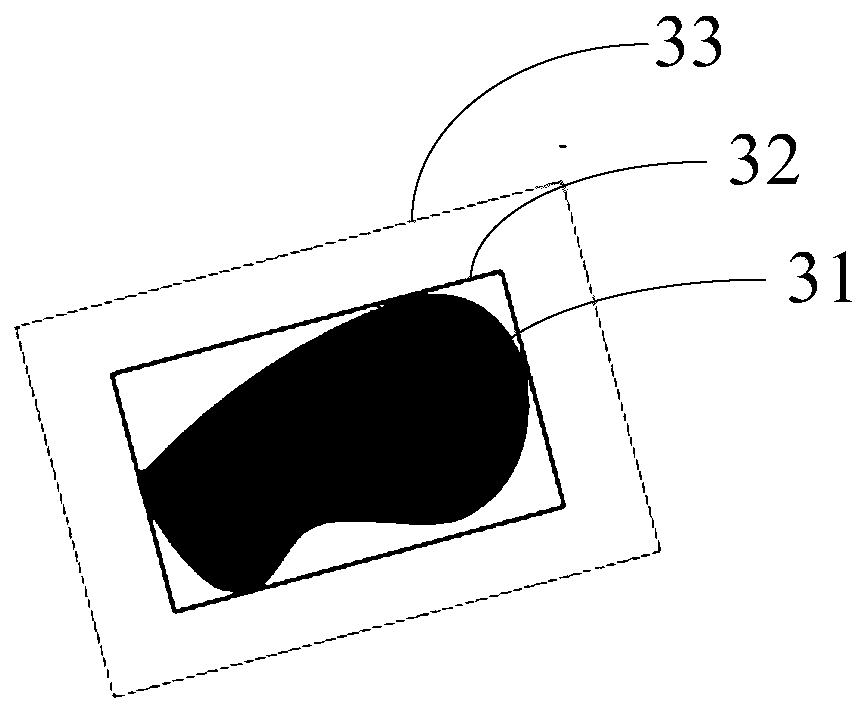
[0064] In a specific implementation mode, please refer to Figure 6 , take the two intersection points of the straight line between the starting point and the target and the outer rectangle of the obstacle as the first control point A and the second control point B respectively; the distance between the four vertices of the outer rectangle of the obstacle is the first control The closest vertex between point A and the second control point B is used as the third control point C; according to the first control point A, the second control point B and the third control point C, a NURBS curve (non-uniform rational B-spline curve) is generated ). In this embodiment, the generated NURBS curve is used as a path for avoiding obstacles, specifically:
[0065] In the linear path between the starting point and the target object, the straight line segment path between the first control point A and the second control point B is replaced with a NURBS curve. In this embodiment, the driving p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More