

Obstacle avoidance method of multi-rotor unmanned aerial vehicle
A technology of multi-rotor UAVs and UAVs, applied in the direction of non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as high risks, achieve effective avoidance, increase use efficiency, reduce collisions, etc. The effect of machine probability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions in the embodiments of the present invention will be clearly and completely described below. Obviously, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
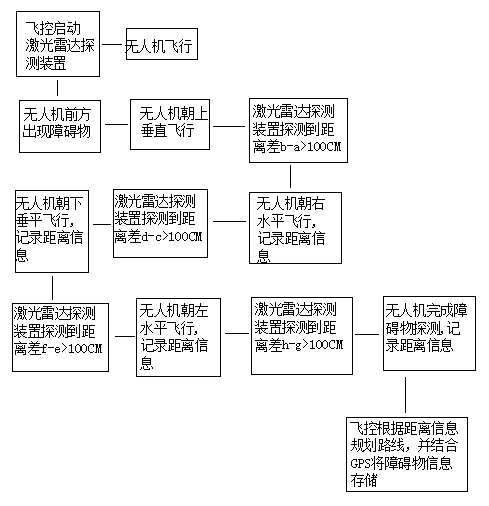
[0016] A method for avoiding obstacles based on a multi-rotor UAV, comprising the steps of:
[0017] 1) When the drone is flying, the flight controller activates the lidar detection device to detect obstacles and distances;
[0018] 2) When the lidar detection device detects an obstacle in front of the UAV, the flight controller of the UAV controls the UAV to fly upward and vertically. The laser radar detection device detects that the distance between the UAV and the obstacle is a, and then detects The distance between the UAV and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More