

Three-dimensional scene fusion method and device based on monocular estimation
A technology of 3D scene and fusion method, which is applied in the field of 3D scene fusion method and device based on monocular estimation, and can solve the problems of unsatisfactory fusion methods and unsatisfactory implementation of monitoring objects and static 3D scene models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] Hereinafter, the present invention will be described in detail with reference to the drawings and examples. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
[0073] It should be noted that the terms "first" and "second" in the description and claims of the present invention and the above drawings are used to distinguish similar objects, but not necessarily used to describe a specific sequence or sequence.
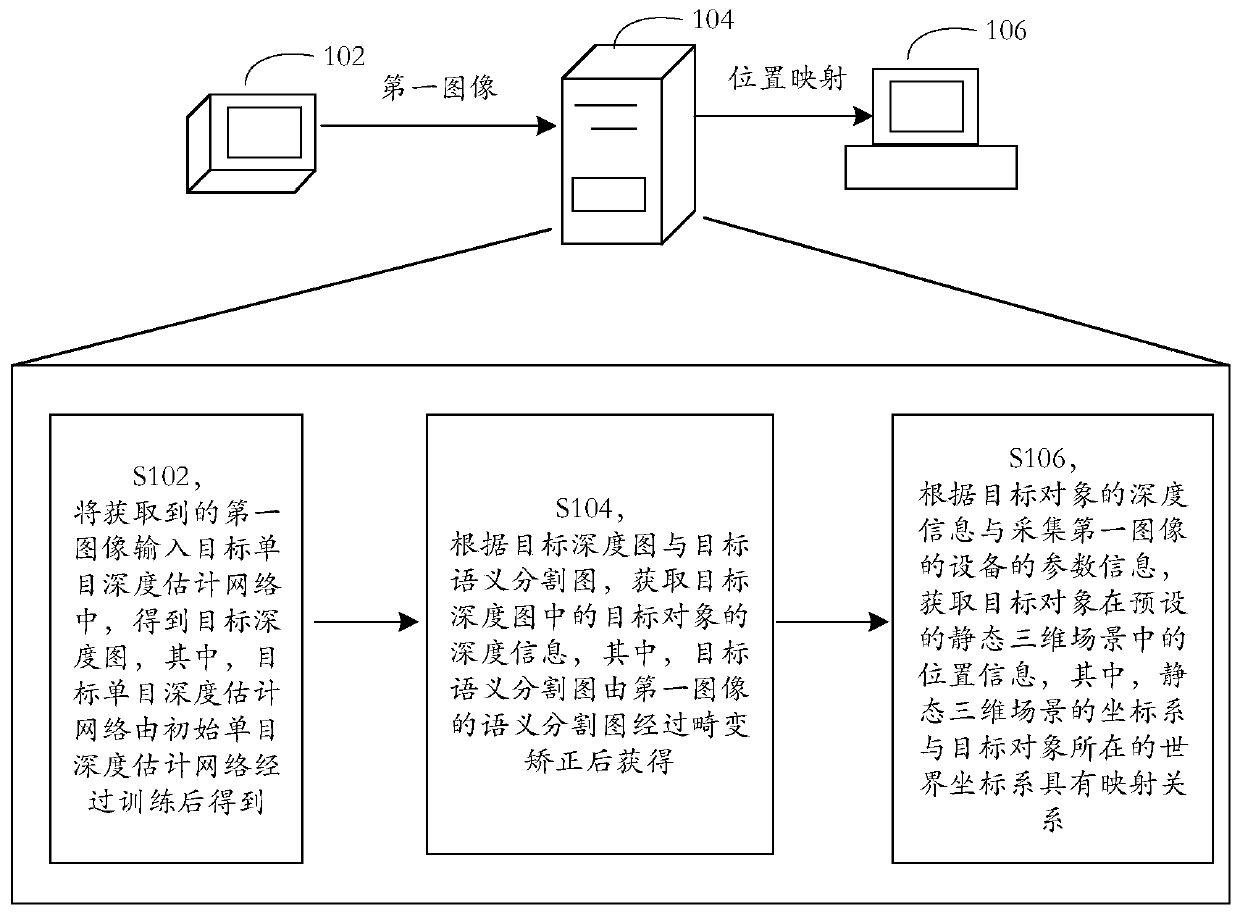
[0074] An embodiment of the present invention provides a 3D scene fusion method based on monocular estimation. figure 1 is a schematic diagram of the hardware environment of an optional monocular estimation-based 3D scene fusion method according to an embodiment of the present invention, as shown in figure 1 As shown, the hardware environment may include, but not limited to, an image acquisition device 102, a server 104, and a display device 106. Opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More