

Vehicle automatic driving transverse control method and system
A technology of automatic driving and lateral control, applied in the control/regulation system, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problems of complex lateral control algorithm, limited adaptability and lower production cost, etc. To achieve the effect of simplifying the lateral control algorithm of vehicle automatic driving, improving the adaptability and reducing the production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
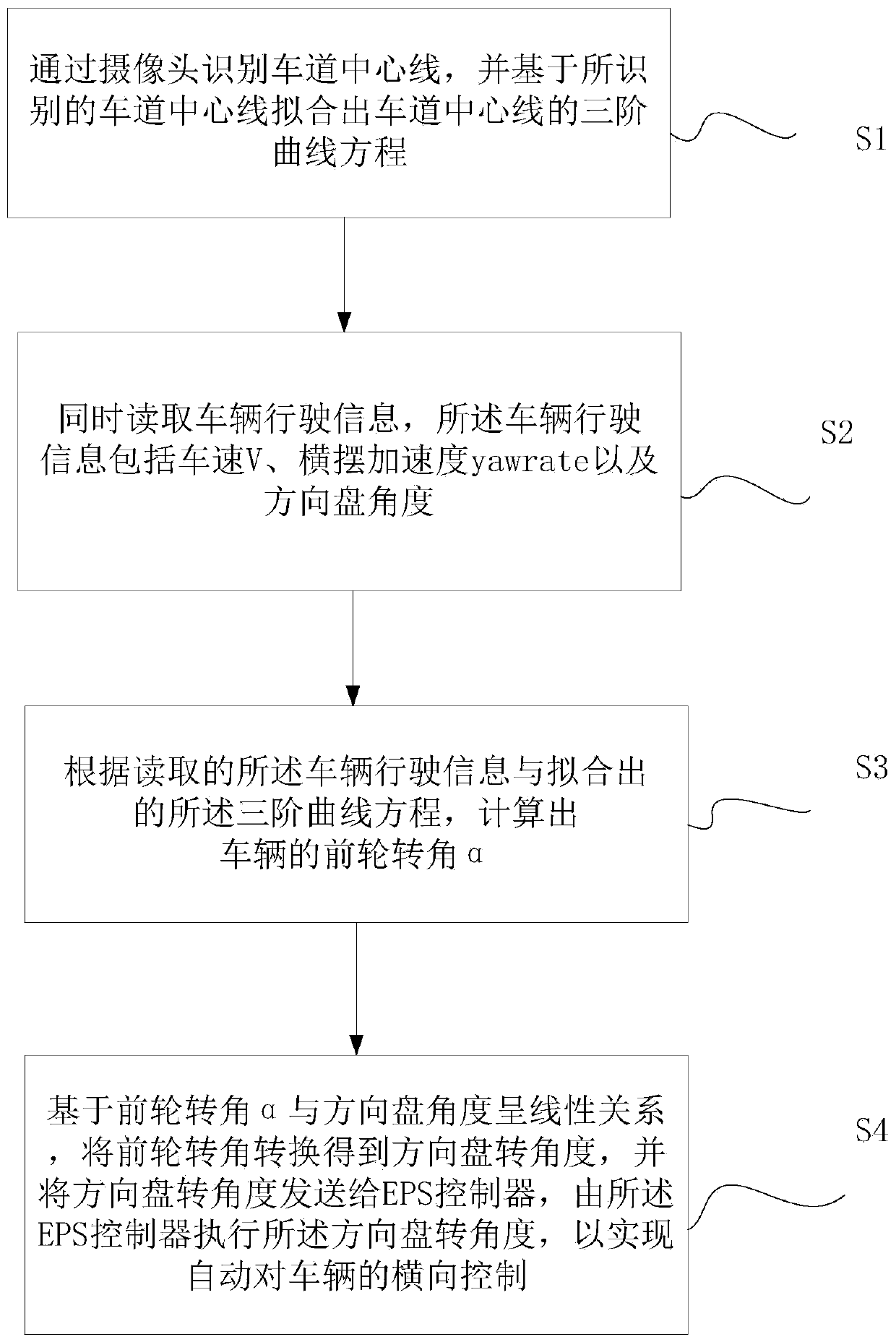
[0044] Such as figure 1 As shown, a vehicle automatic driving lateral control method includes the following steps:
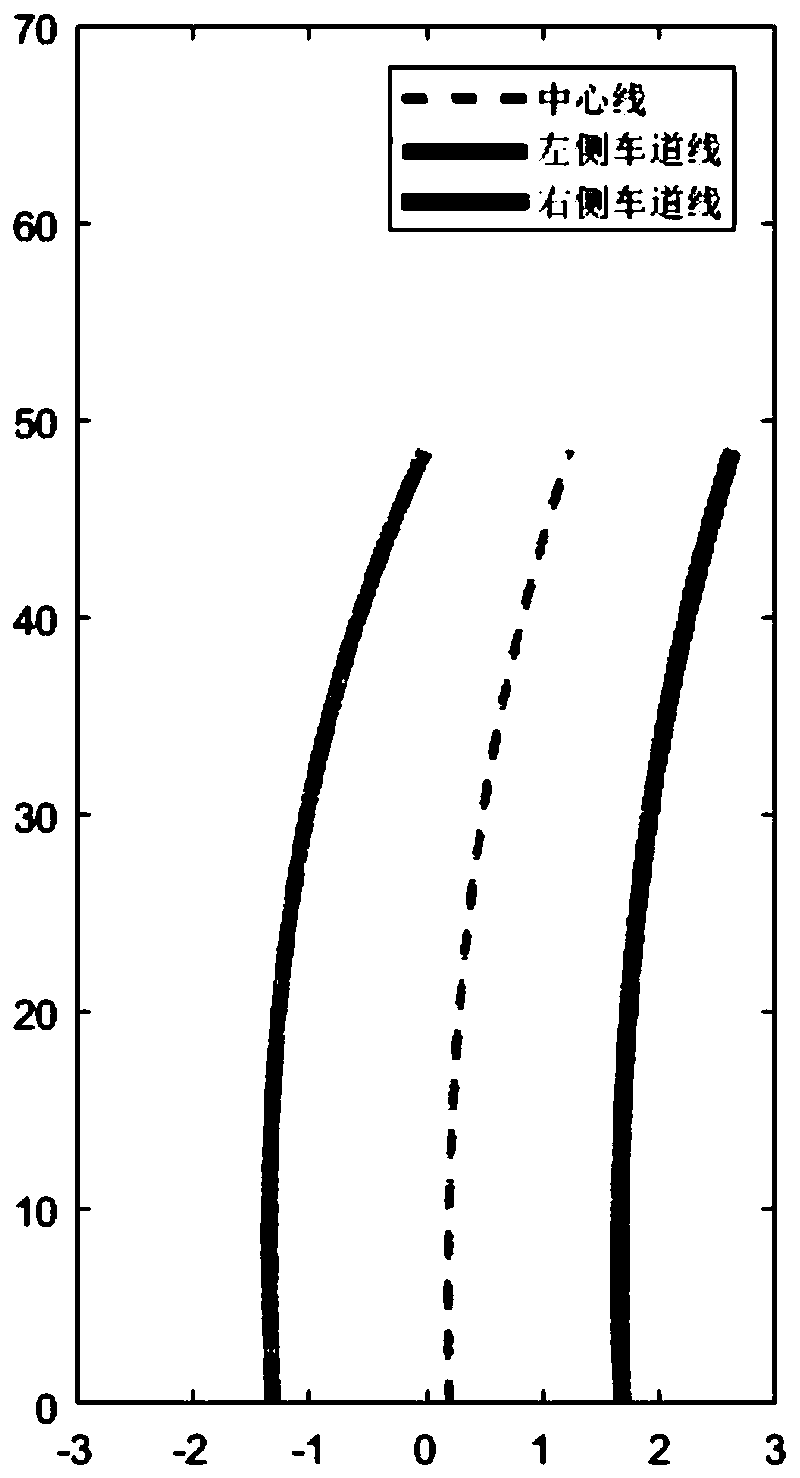
[0045] In step S1, the centerline of the lane is identified by the camera, and a third-order curve equation of the centerline of the lane is fitted based on the identified centerline of the lane.
[0046] Step S2, read the vehicle running information at the same time, the vehicle running information includes vehicle speed V, yaw acceleration yawrate and steering wheel angle.
[0047] Step S3, calculating the front wheel rotation angle α of the vehicle according to the read vehicle driving information and the fitted third-order curve equation.
[0048] Step S4, based on the linear relationship between the front wheel angle α and the steering wheel angle, convert the front wheel angle α to obtain the steering wheel angle β, and send the steering wheel angle β to the EPS controller, and the EPS controller executes the steering wheel rotation angle β. Angle β to r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More