

Robot trajectory tracking method and system and storage medium
A trajectory tracking and robot technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve the problems of running speed and safety performance, and achieve the effect of improving trajectory tracking performance, comprehensive tracking and obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
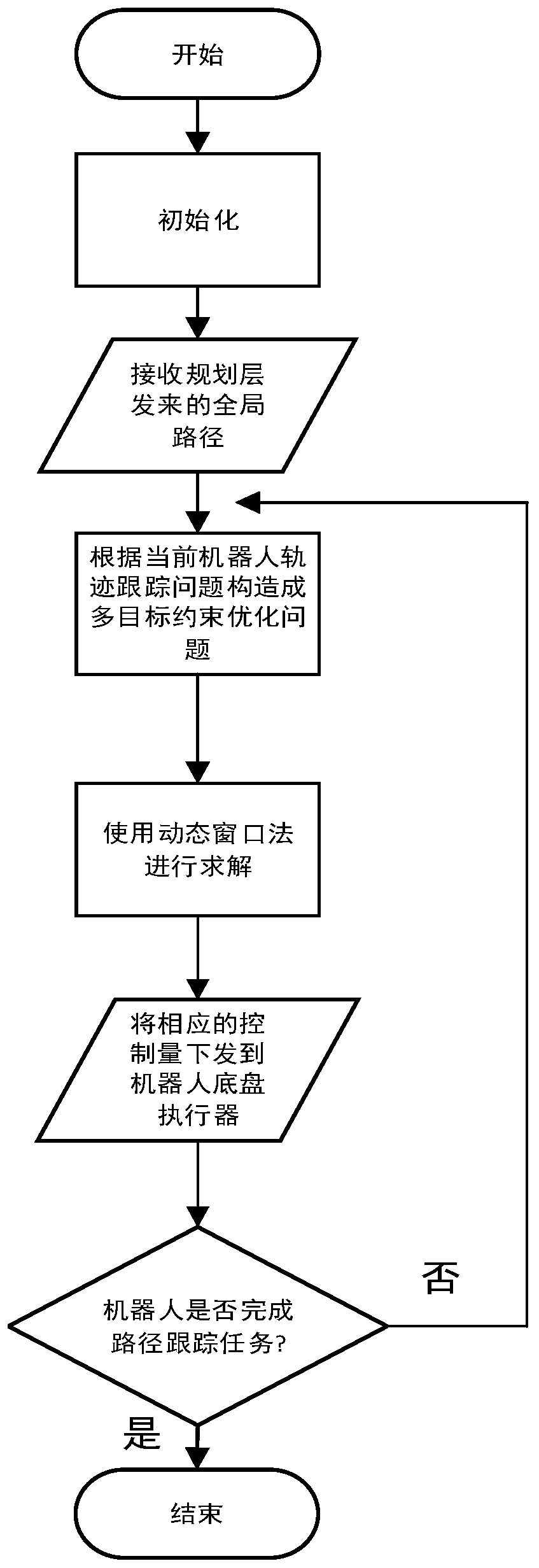
[0071] An embodiment of the present invention provides a trajectory tracking method for an indoor two-wheel differential robot based on elastic constraints, such asfigure 1 shown, including the following steps:
[0072] Step 1. The differential robot receives the global path sequence sent by the upper planner
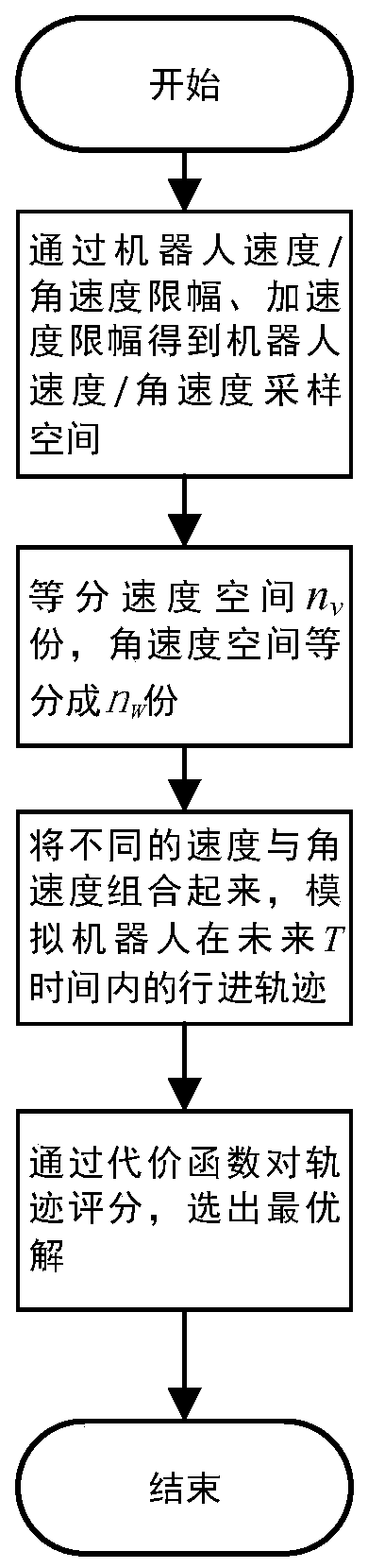
[0073] Step 2, the global path sequence, the differential robot trajectory tracking problem is constructed as an optimal planning problem, and the dynamic window method is used to solve the local optimal trajectory sequence X * :={x i ,y i ,θ i} i=1,...n and control sequence U * :={v i ,ω i} i=1,...n-1 ;
[0074] Step 3, the first m values U of the velocity and angular velocity sequence obtained from the solution m * :={v i ,ω i} i=1,...m , sent to the robot chassis actuator according to the control cycle, m is taken as 1;
[0075] Step 4, if the robot reaches the end point, stop, otherwise jump to step 2.
[0076] The specific steps of the method in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More