

Unmanned aerial vehicle multi-tower inspection optimization method and terminal under limited inspection time
A time-limited, unmanned aerial vehicle technology, applied in the direction of instruments, three-dimensional position/channel control, control/adjustment system, etc., can solve the problems of inspection task failure and inspection failure, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
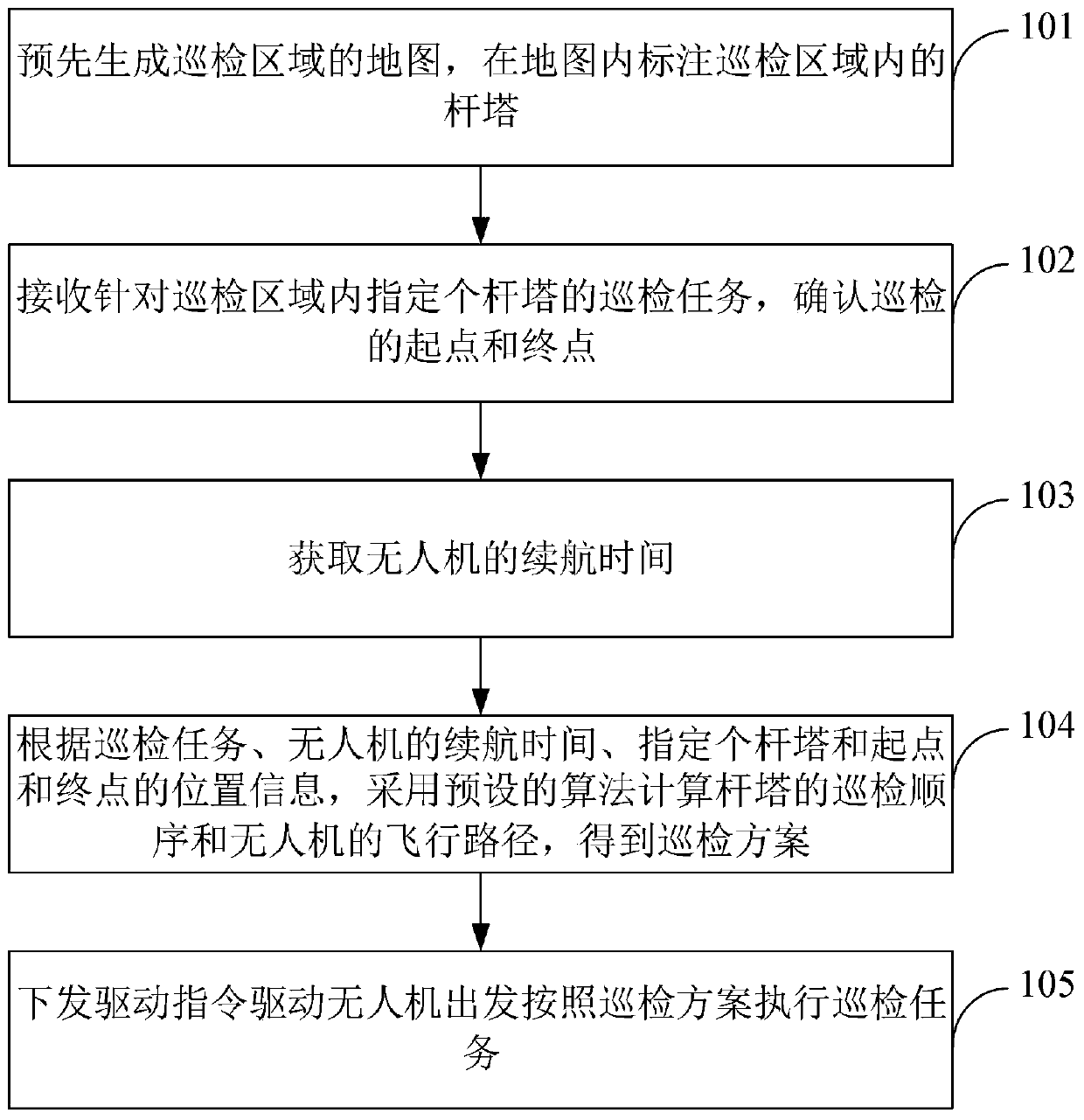
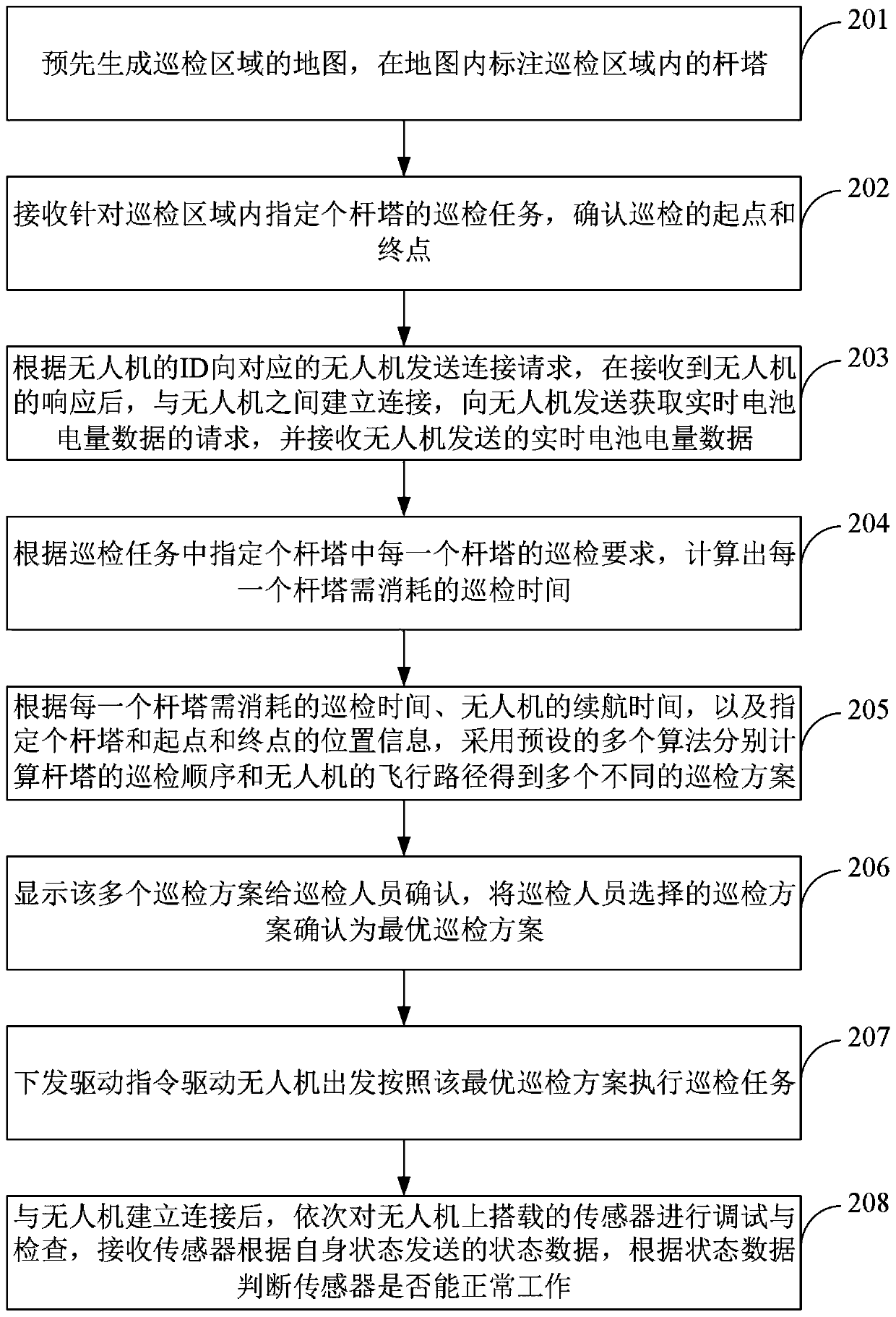
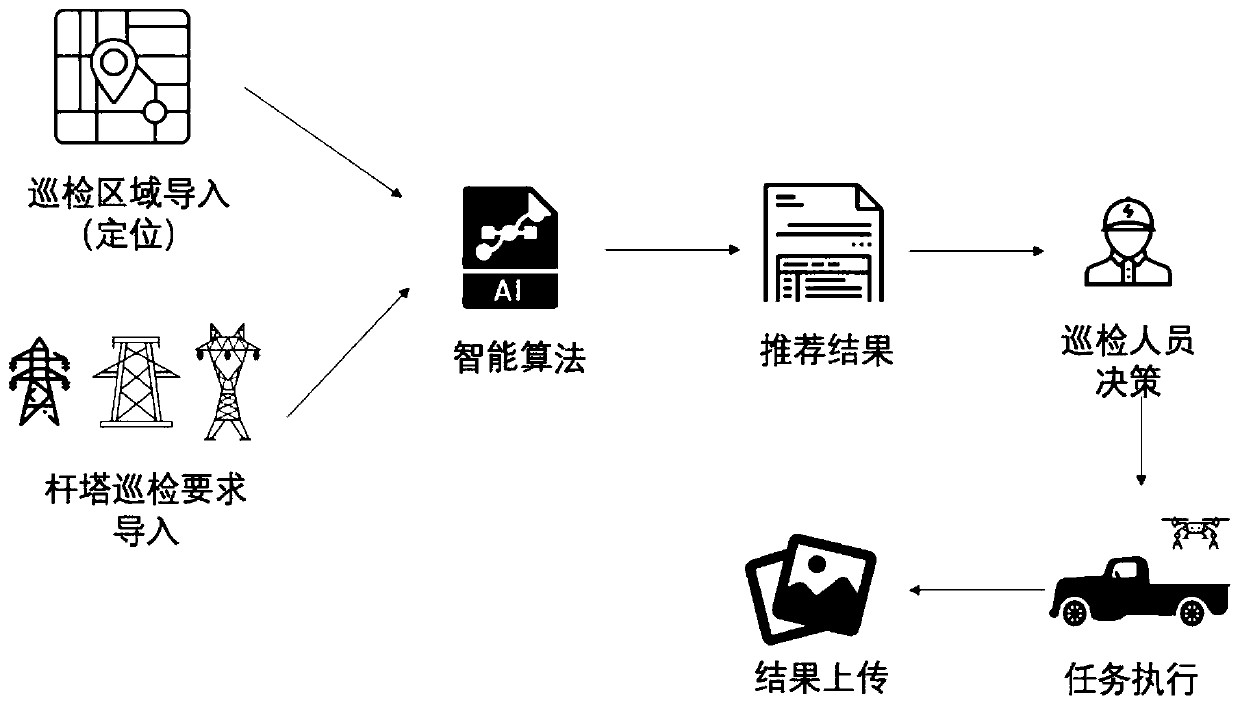
[0048] The embodiment of the present invention provides a UAV multi-tower inspection optimization method and terminal under the limited inspection time, based on the inspection time is limited by a UAV to optimize the multi-tower inspection. Among them, the UAV is usually located on-site in the inspection area and is controlled by the above-mentioned terminal. In an inspection area, there are several towers waiting for inspection, and the inspection time consumed by each tower is known and different, and the endurance time of the UAV is limited. In the case of time constraints, it is necessary to plan the order in which the UAV inspects these towers and the path selection between the towers.
[0049] see figure 1 , an embodiment of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More