

Unmanned motorcade control method based on vehicle state information
A technology of state information and control method, which is applied in traffic control systems of road vehicles, vehicle wireless communication services, and services based on specific environments, etc. It can solve channel congestion, vehicle network driving safety problems, and affect wireless transmission reliability, etc. problem, to achieve the effect of reducing the occupancy of wireless channels and reducing the transmission frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
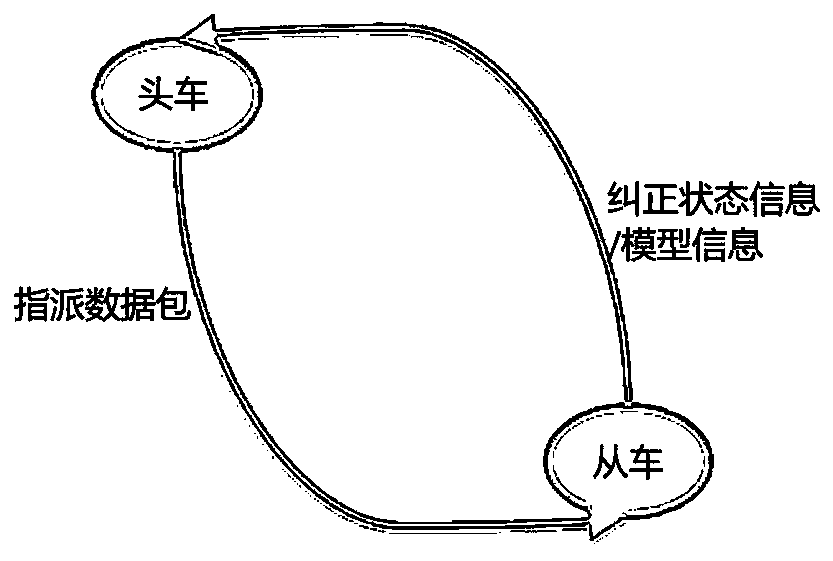
[0016] The implementation scenario of this embodiment is formation driving: driving in a convoy, the first vehicle is the lead vehicle and has the right to accelerate and decelerate, and the subsequent vehicles are slave vehicles and have no independent control right, that is, they cannot perform acceleration and deceleration processing. The goal is to maintain a certain distance between all vehicles and drive synchronously to save fuel consumption of the vehicles.
[0017] Such as figure 1 As shown, the head car broadcasts the assigned data packet including the acceleration information of each slave car through the wireless channel; the slave car receives the assigned data packet through the wireless channel and parses out the corresponding acceleration information and controls the respective driving accordingly. At the same time, the slave car periodically updates the model parameters in the model information online, and sends the updated model information to the head car in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More