

A teleoperation planning method for space manipulator based on omega handle
A technology for space manipulators and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of unintuitive mapping between Omega handles and space manipulators, reduce the probability of kinematic singularity, and simplify motion control Reliable, low-resource effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
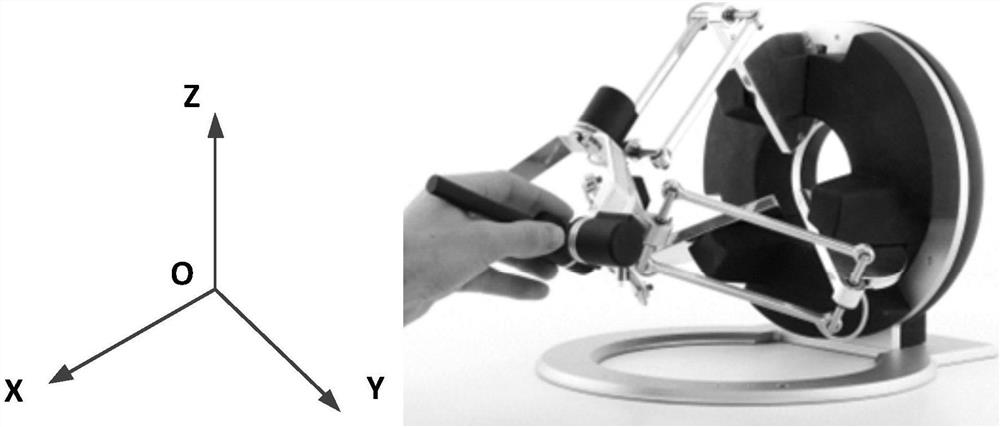
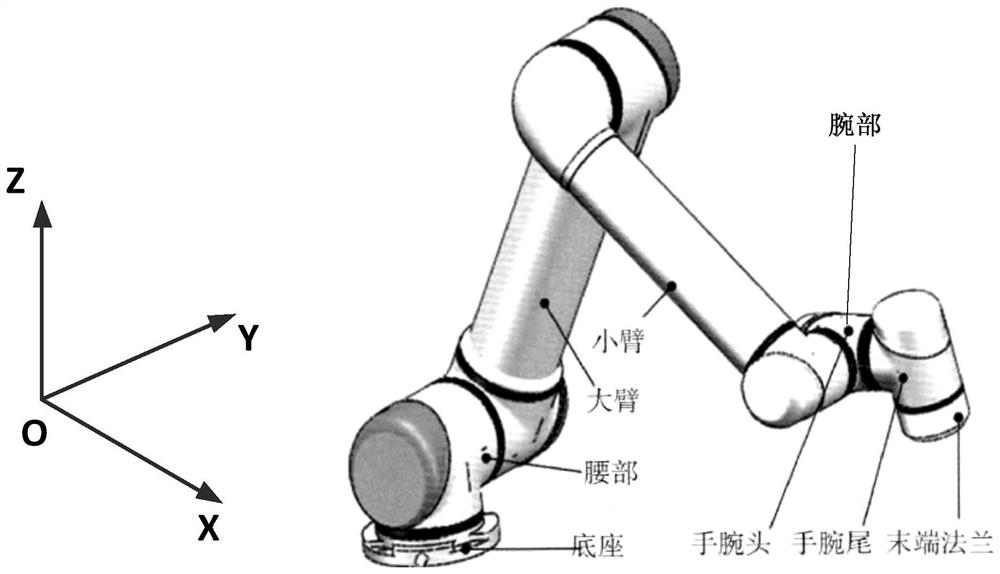
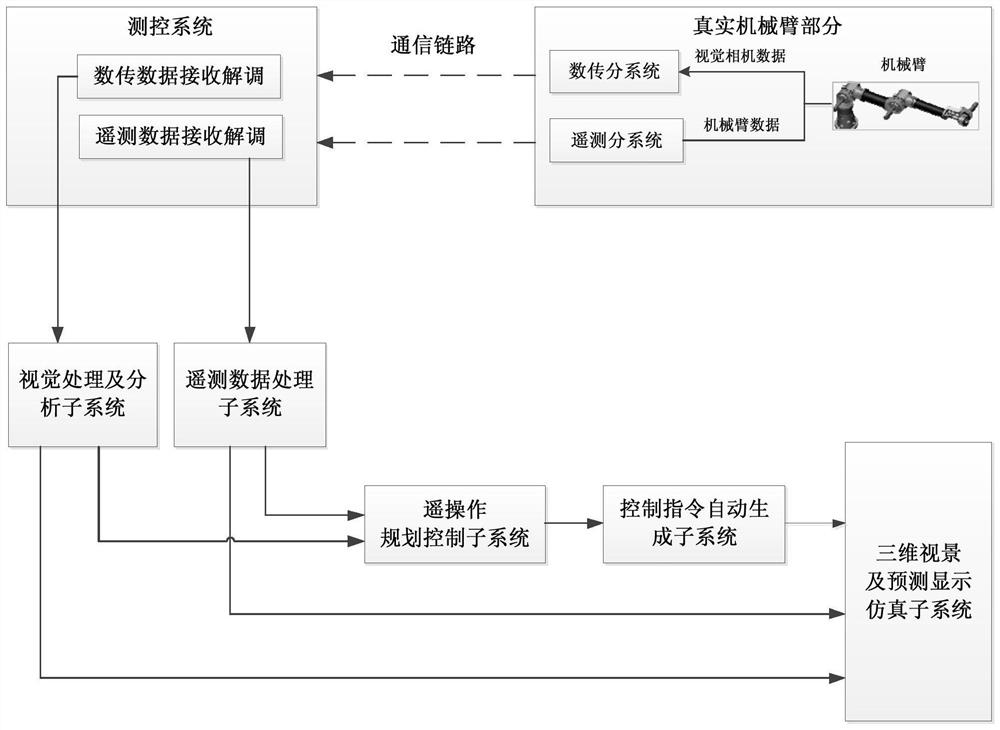
[0065] Based on the built teleoperation ground test system, the manipulator teleoperation planning method disclosed in the present invention is used. The robotic arm adopts a series structure, and a hand-eye binocular camera is installed at the end. Considering the safety, in the remote operation test, the enabling device—pedal is introduced. It can control whether the operation command generated by the Omega handle is sent to the robot arm for execution: when the operator steps on the pedal, the operation command can be sent to the robot arm for execution; when the operator releases the pedal, the stop command is sent to the robot arm, The robotic arm stops working. After confirming that the status of each device is correct, start the test: Based on the images returned by the hand-eye binocular camera, the operator operates the Omega handle to control the movement of the robotic arm to the target star, and when the target star docking ring is in the claw at the end of the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More